2603.10165_OpenClaw-RL: Train Any Agent Simply by Talking¶
引用:
组织:
链接:
总结¶
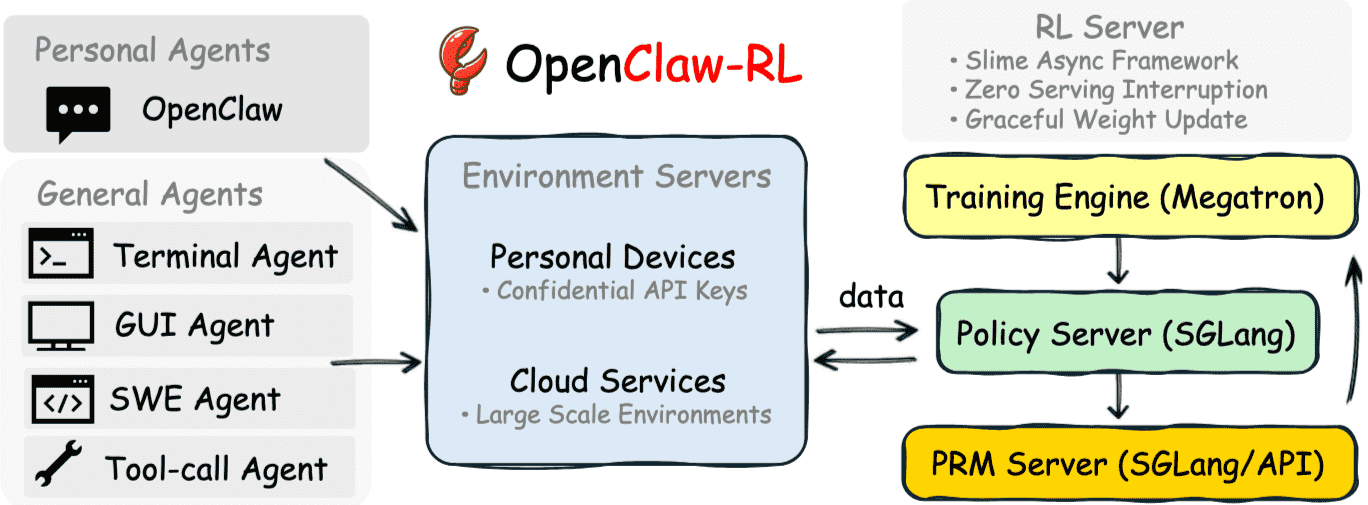
Figure 1 | OpenClaw-RL infrastructure overview.
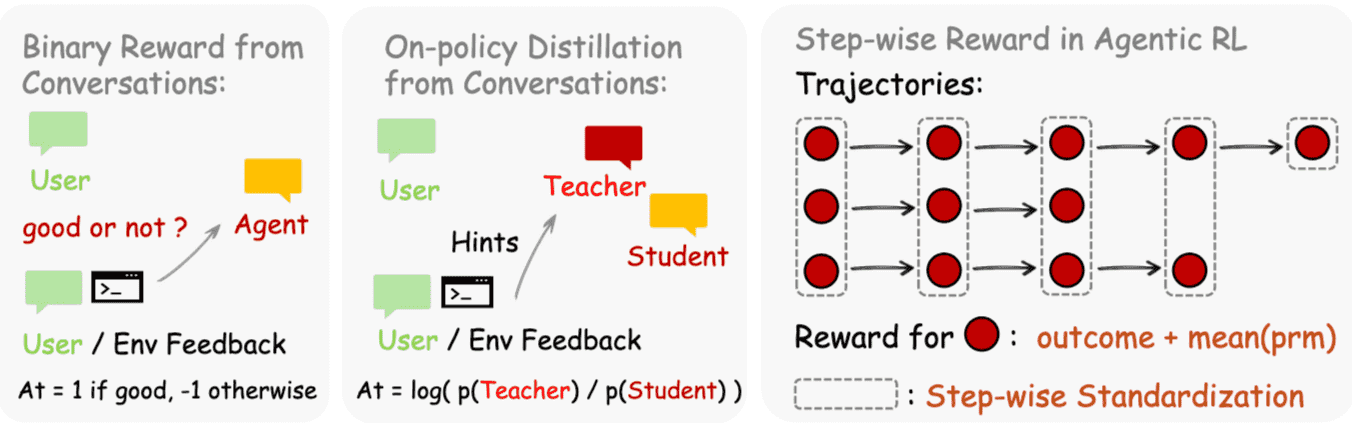
Figure 3 | Method Overview. For personal agents, we support both binary-reward optimization and on-policy distillation training.
From Moonlight¶
三句摘要¶
💡 OpenClaw-RL提出了一个创新的框架,将所有agent交互产生的下一状态信号(如用户回复、工具输出)作为实时的在线学习来源,从而能同时训练个人和通用AI代理。
🛠️ 该系统通过两种互补方法从这些信号中提取信息:利用PRM裁判将评估信号转化为标量奖励的Binary RL,以及使用Hindsight-Guided OPD从指令信号中提取文本提示并提供更精细的token级方向性优势监督。
🚀 其异步解耦架构确保了策略服务、奖励判断和模型训练的无缝并行运行,实现了零中断的在线优化,并通过在个人和通用代理任务上的实证验证了其有效性和可扩展性。
关键词¶
OpenClaw-RL: OpenClaw-RL是一个统一的框架,旨在从个人代理和通用代理的交互中,实时在线地恢复“下一状态信号”中的两种信息:评估信号和指令信号。它适用于多种场景,包括个人对话、终端执行、图形用户界面(GUI)交互、软件工程(SWE)任务和工具调用环境。该框架基于完全解耦的异步架构,支持连续训练,无需预先收集数据。
Next-state signals: 下一状态信号是每次代理交互后产生的通用信号,例如用户回复、工具输出、终端或GUI状态变化,或测试结果。OpenClaw-RL独创性地将其作为实时在线学习的来源,从中提取评估信息和指令信息。
Evaluative signals: 评估信号是下一状态信号中编码的一种信息形式,它隐含地表示代理的行动表现如何,可视为对行动的评分。例如,用户的重复查询表示不满,通过的测试表示成功,错误跟踪表示失败。在OpenClaw-RL中,这些信号通过PRM判别器被提取为标量奖励。
Directive signals: 指令信号是下一状态信号中编码的另一种信息形式,它指明代理的行动应该如何不同,通常在标记(token)层面提供具体的修正方向。例如,用户明确指出“你应该先检查文件”,或详细的SWE错误跟踪暗示了具体的修正方向。OpenClaw-RL通过事后引导式在线策略蒸馏(Hindsight-Guided On-Policy Distillation, OPD)来恢复这些信号。
PRM judge: PRM(过程奖励模型)判别器是OpenClaw-RL中的一个组件,负责根据随后的下一状态信号评估代理行动的质量。对于个人代理,它根据用户回复或工具结果判断满意度/不满意度,并通常通过多数投票机制分配标量奖励(例如+1、-1、0)。对于通用代理,它判断环境反馈是否表明任务取得了进展。这为长期任务提供了密集的、分步骤的“过程奖励”。
Hindsight-Guided On-Policy Distillation (OPD): 事后引导式在线策略蒸馏(OPD)是OpenClaw-RL中用于个人代理的一种方法,它将指令性的下一状态信号转化为标记(token)层面的教师监督。该方法包括从下一状态中提取简洁的文本提示,通过将该提示添加到原始提示中来构建一个“增强的教师上下文”,然后根据模型在增强上下文(教师)和原始上下文(学生)下的对数概率差距计算标记层面的优势值。这为策略改进提供了详细的方向性指导。
Asynchronous Pipeline: 异步流水线是OpenClaw-RL的核心架构原则。它包含四个完全独立的异步循环:策略服务、环境托管、PRM判别和策略训练。这种解耦设计确保了组件之间互不阻塞,从而支持从实时异构交互流中进行持续训练,且不会中断服务或要求批量处理数据。
Personal Agents: 个人代理是OpenClaw-RL支持的一种代理类型,通常在个人用户的设备上进行对话式交互(例如OpenClaw)。对于这类代理,环境即用户的设备,提供了稀疏、基于会话且高度个性化的交互流。OpenClaw-RL通过恢复对话信号(用户重复查询、纠正、明确反馈)使这些代理在正常使用中自动改进。
General Agents: 通用代理是OpenClaw-RL支持的一类代理,旨在实现各种真实世界场景下的可扩展强化学习训练。这包括终端代理、GUI(图形用户界面)代理、SWE(软件工程)代理和工具调用代理,它们通常托管在云服务上以实现大规模并行化。OpenClaw-RL利用这些环境中的结构化执行信号进行训练。
Binary RL: 二元强化学习是OpenClaw-RL为个人代理提供的一种优化选项。它使用PRM将评估性的下一状态信号(例如,用户满意度/不满意度)转化为标量过程奖励(例如+1、-1、0)。训练目标是标准的PPO风格截断代理目标函数,其中奖励(优势值)由PRM提供的标量结果决定。这种方法提供了覆盖范围广但信号粗糙的训练。
Process Rewards: 过程奖励是指在代理交互的每一步或每个回合中,根据即时的下一状态信号所分配的奖励。与“仅结果”奖励(仅在最终步骤给出)不同,过程奖励为长时间任务的整个过程提供了密集的信用分配。在OpenClaw-RL中,这些奖励由PRM判别器根据实时下一状态信号推断得出,并被认为对代理任务至关重要。
SGLang: SGLang是OpenClaw-RL中用于策略服务(向请求提供代理响应)和PRM服务器的框架。它是OpenClaw-RL异步流水线中四个解耦组件之一。
Megatron: Megatron是OpenClaw-RL中用于训练引擎的框架。它是OpenClaw-RL异步流水线中四个解耦组件之一,负责策略训练。
Slime: Slime是OpenClaw-RL所基于的一个框架,尤其为通用代理的可扩展训练基础设施提供了支持。它支撑了OpenClaw-RL完全解耦的异步架构,使得能够从实时部署中进行持续训练,并实现零服务中断和平滑的权重更新。
核心¶
这篇论文的核心在于提出并实现了一个名为 OpenClaw-RL 的统一强化学习(RL)框架。该框架的根本洞察是:任何智能体交互后产生的“下一状态信号”(next-state signals),无论是用户回复、工具输出、终端或图形用户界面状态变化,还是测试结果,都包含着宝贵的学习信息,而这些信息常常被现有系统所忽略。
具体来说,OpenClaw-RL 认为这些下一状态信号编码了两种形式的信息,并且可以被普遍应用于训练同一个策略:
评估信号(Evaluative signals):这些信号隐含地指示了先前动作的表现好坏。OpenClaw-RL 通过“过程奖励模型”(PRM judge)将这些信号提取为标量奖励。
指令信号(Directive signals):这些信号提供了关于动作应该如何改进的直接指导,甚至可以细化到标记(token)层面。OpenClaw-RL 通过“事后引导式在线策略蒸馏”(Hindsight-Guided On-Policy Distillation, OPD)方法来恢复这些更丰富的方向性监督信号。
该框架最大的创新点在于其 统一性 和 在线学习能力:
它能够将个人对话、终端执行、GUI 交互、软件工程(SWE)任务和工具调用等多种异构交互流,同时 作为实时、在线的学习来源,用于训练同一个策略。
其异步解耦的架构(包括策略服务、环境托管、PRM 判别和策略训练)确保了模型可以在服务的同时进行持续学习,实现“零服务中断”和“优雅权重更新”。
论文展示了结合二元强化学习(Binary RL)和 OPD 方法,可以为个人智能体带来显著的个性化改进,同时也能为通用智能体(如终端、GUI、SWE、工具调用)提供可扩展的 RL 训练,尤其强调了“过程奖励”(Process Rewards)对长周期任务的重要性。
简而言之,OpenClaw-RL 的核心理念是:通过挖掘智能体与环境交互中无处不在的“下一状态信号”,实现智能体的持续在线学习和自我提升,从而让智能体“越用越聪明”。
摘要¶
OpenClaw-RL是一个为AI智能体设计的强化学习(RL)框架,其核心洞察在于:每次智能体交互都会产生一个next-state信号(如用户回复、工具输出、终端或GUI状态变化),这些信号是通用且可以同时用于训练同一个策略的在线学习来源。现有系统未能充分利用这些信号作为实时的在线学习来源。OpenClaw-RL旨在回收这些被浪费的evaluative信号(指示动作执行的好坏)和directive信号(指示动作应如何改进)。
核心方法论: OpenClaw-RL采用异步解耦架构,包含四个独立运行的组件:策略服务(Policy Serving)、环境(Environment)、奖励判断(PRM Judging)和策略训练(Policy Training)。这种设计确保了各组件之间无阻塞依赖,实现了连续训练而服务不中断。
回收Evaluative信号:二元RL(Binary RL) 二元RL通过一个过程奖励模型(PRM)将next-state信号转化为标量过程奖励。对于每个动作\(a_t\)和next-state \(s_{t+1}\),PRM判断其质量,输出\(r \in \{+1, -1, 0\}\)。PRM通过多次独立查询(例如\(m\)次)并进行多数投票(MajorityVote)来确定最终奖励\(r_{final}\)。 训练目标是一个标准的PPO风格的截断代理目标(clipped surrogate objective),并结合了KL散度惩罚: $\(L = L_{pg} + \beta_{KL} \cdot L_{KL}\)\( 其中,\)L_{pg} = -\mathbb{E}t \left[ \min(\rho_t A_t, \text{clip}(\rho_t, 1 - \epsilon, 1 + \epsilon{high}) \cdot A_t) \right]\(。这里,\)\rho_t = \frac{\pi_\theta(a_t | s_t)}{\pi_{old}(a_t | s_t)}\(是重要性采样比,优势函数\)A_t = r_{final}\(。\)\epsilon\(和\)\epsilon_{high}\(是PPO的裁剪参数,\)\beta_{KL}$是KL散度系数。
回收Directive信号:Hindsight-Guided On-Policy Distillation (OPD) OPD将next-state信号转化为token级别的指导性监督。它解决标量奖励无法提供细粒度方向性反馈的问题。
步骤1:Hindsight Hint提取。 如果next-state信号包含有用的纠正信息,PRM会提取一个简洁、可操作的textual hint,格式为
[HINT_START]...[HINT_END],并返回得分和提示。步骤2:Hint选择和质量过滤。 从多个PRM判断结果中选择得分高且信息量最丰富的hint(通常是字符数最多的有效hint)。若无有效hint,则丢弃该样本。这确保了OPD训练的样本质量。
步骤3:增强教师上下文构建。 将提取的hint附加到原始用户消息中,形成一个增强提示\(s_{enhanced} = s_t \oplus \text{hint}\)。这模拟了如果用户在一开始就给出纠正提示,模型应该如何反应。
步骤4:Token级别优势计算。 策略模型在\(s_{enhanced}\)下对原始响应\(a_t\)进行强制输入,计算每个token的log-probabilities。Token级别的优势函数\(A_t\)定义为: $\(A_t = \log \pi_{teacher}(a_t | s_{enhanced}) - \log \pi_\theta(a_t | s_t)\)\( 其中,\)\pi_{teacher}\(是模型在增强上下文下的分布,\)\pi_\theta\(是模型在原始上下文下的分布。正的\)A_t\(表示教师模型赋予该token更高的概率,学生模型应增加其权重;负的\)A_t$则反之。这种方法提供了比标量奖励更丰富的per-token方向性指导。
二元RL和OPD的结合 Binary RL和OPD是互补的。Binary RL提供广泛的梯度覆盖,适用于所有可评分的交互;OPD则在存在丰富指导性信号的样本上提供高分辨率的token级校正。OpenClaw-RL通过加权损失将两者结合,共享PPO损失,仅优势函数计算不同: $\(A_t = w_{binary} r_{final} + w_{opd} (\log \pi_{teacher}(a_t | s_{enhanced}) - \log \pi_\theta(a_t | s_t))\)\( 默认情况下,\)w_{binary} = w_{opd} = 1$。
通用智能体的分步奖励(Step-wise Reward) 对于长周期任务,仅依赖最终结果(outcome)的奖励(outcome-only rewards)会导致梯度稀疏。OpenClaw-RL通过PRM为每一步(turn)分配奖励,基于next-state信号提供密集的信用分配。最终的奖励结合了outcome和process rewards: $\(Reward = o + \sum_{i=1}^m r_i/m\)\( 其中\)o\(是最终结果奖励,\)r_i$是PRM独立分配的单步奖励。为了在没有明确状态集群的情况下进行标准化,OpenClaw-RL直接对具有相同步骤索引的动作进行分组。
实验验证: OpenClaw-RL在个人智能体(通过对话信号学习)和通用智能体(终端、GUI、SWE、工具调用)两个方面进行了验证。实验结果表明,在个人智能体场景下,二元RL和OPD的结合带来了显著的优化效果。在通用智能体场景下,该框架支持大规模环境并行化,并验证了分步奖励对于长周期任务的重要性。
Abstract¶
1. Introduce¶
核心观点概述:¶
作者指出,当前大多数AI代理在与环境交互时虽然会收集大量数据,但这些数据仅用于生成下一步动作的上下文,而没有被用于在线学习。实际上,这些“next-state信号”(下一状态信号)中蕴含了对前一步动作的隐式评估和指导信息,是宝贵的在线学习资源。
1.1 Waste 1 — Evaluative signals(评估信号)¶
重点内容:
next-state信号包含评估信息:例如用户回复、测试结果、GUI状态变化等,都隐含着对前一步动作的好坏评价。
用户重新提问 → 表示不满意;
测试通过 → 表示成功;
错误追踪 → 表示失败。
这些信号天然构成过程奖励(process reward),无需额外标注,但目前仅在数学推理任务中被PRM(Process Reward Model)研究使用 [lightman2023let, wang2024math, cui2025process]。
在个人代理中,这种信号可用于逐轮对话中捕捉用户满意度;
在通用代理中,它提供了长周期任务所需的密集奖励信号 [wang2026rlanything]。
非重点内容:
当前系统要么忽略这些信号,要么只在离线数据中使用它们,依赖固定数据集或最终结果奖励。
1.2 Waste 2 — Directive signals(指导信号)¶
重点内容:
next-state信号不仅评分,还可能包含具体修改方向:
用户说“你应该先检查文件” → 不仅指出错误,还给出修改建议;
SWE任务中的错误日志 → 可能暗示具体修正方向。
现有方法的局限性:
RLVR方法使用标量奖励,无法提取方向性梯度 [shao2024deepseekmath, guo2025deepseek, hu2025open, yu2025dapo];
蒸馏方法依赖预处理反馈-响应对,而非实时信号 [shenfeld2026self, hubotter2026reinforcement];
回顾重标签(hindsight relabeling)和上下文增强蒸馏方法虽有效,但仍在固定数据集上运行 [zhang2023wisdom, yang2024buffer, yang2025supercorrect];
并行工作 [kleinebuening2026aligning] 利用next-state信息提示策略,但纠正信息仍为隐式。
1.3 OpenClaw-RL 框架介绍¶
重点内容:
目标:统一回收两种next-state信号(评估与指导),适用于个人代理和通用代理,涵盖多种交互环境(对话、终端、GUI、SWE、工具调用)。
架构特点:
基于 slime [slime_github],采用完全解耦的异步架构;
政策服务、rollout收集、PRM评分、策略训练四个模块独立运行,无阻塞依赖;
支持从部署中持续学习,而非传统RL的批量数据收集。
两种优化方法:
Binary RL(二值RL):使用PRM将对话转化为标量过程奖励;
Hindsight-Guided On-Policy Distillation(OPD):
从next-state中提取文本提示;
构建增强的教师上下文;
将token级别的方向性监督蒸馏回学生模型,提供标量奖励无法提供的训练信号。
实验结果:
两种方法结合加权损失函数,显著提升性能;
框架可扩展至终端、GUI、SWE、工具调用等通用代理训练;
集成PRM与可验证结果,提供密集且可靠的监督;
支持大规模环境并行部署于云服务。
1.4 Contributions(贡献)¶
重点内容:
将next-state信号作为在线学习源:
识别其包含的评估与指导信息;
支持多种交互类型(对话、终端、GUI、SWE、工具调用)。
OpenClaw-RL系统架构:
第一个统一多流交互的系统;
支持无中断服务、多轮会话跟踪、平滑权重更新、灵活PRM支持、大规模环境并行。
两种互补的信号回收方法:
Binary RL:通过PRM获得密集标量奖励;
Hindsight-Guided OPD:提取文本提示,构建增强教师上下文,提供token级方向性监督。
实证验证广泛有效:
在个人代理个性化与通用代理RL任务中验证;
证明Binary RL与Hindsight-Guided OPD互补,联合使用效果更佳;
验证过程奖励与结果奖励结合的有效性。
如需继续总结后续章节(如方法、实验等),欢迎继续提供内容。
2 Problem Setting¶
本节介绍了 OpenClaw-RL 所基于的强化学习框架,强调其适用于多种交互场景的灵活性,并将每个交互流形式化为一个马尔可夫决策过程(MDP)。
核心设定:¶
OpenClaw-RL 基于策略 πθ,能够同时处理多个交互流,并将这些交互流与推理流程解耦,从而适用于多种智能体场景,包括:
个人代理对话(personal agent conversations)
终端执行(terminal executions)
图形界面交互(GUI interactions)
软件工程任务(SWE tasks)
工具调用轨迹(tool-call traces)
每个交互流被建模为一个 MDP,记作 (𝒮,𝒜,𝒯,r),包含以下四个要素:
1. 状态(State)¶
st ∈ 𝒮:表示在第 t 轮时的完整对话或环境上下文。
✅ 重点:状态是当前交互历史的完整表示,是策略 πθ 的输入。
2. 动作(Action)¶
at ∈ 𝒜:由策略 πθ 生成的一段 token 序列,表示智能体的响应。
✅ 重点:动作是模型输出的文本,直接影响后续环境状态。
3. 状态转移(Transition)¶
𝒯(st+1 | st, at):环境决定性地根据当前状态和动作给出下一个状态。
st+1 可以是用户的回复、执行结果或工具输出。
✅ 重点:转移是确定性的,下一状态由环境反馈决定。
4. 奖励(Reward)¶
r(at, st+1):通过 PRM(过程奖励模型)判断器从下一状态中推断出的奖励。
✅ 重点:奖励依赖于动作和下一状态,提供更细粒度的学习信号。
与传统 RLVR 的对比¶
在传统 RLVR(强化学习与验证)中,整个轨迹的最终结果 o 作为唯一奖励信号。
而 OpenClaw-RL 利用的是每一步的奖励信号 r(at, st+1),这种信号更丰富,尤其当 st+1 包含对动作改进方向的明确指示时。
✅ 关键创新点:使用在线策略蒸馏(on-policy distillation)将这些方向性信号转化为 token 级别的教师监督信号,从而实现策略的定向优化。
引用文献支持:
Agarwal et al., 2024(策略蒸馏)
Hubotter et al., 2026(强化学习中的方向信号利用)
总结¶
本节为后续方法奠定了理论基础,强调了 OpenClaw-RL 在多模态交互设置下的通用性,并通过 MDP 框架形式化问题,重点突出了过程奖励建模和策略蒸馏机制在提升策略学习效率中的作用。
3 OpenClaw-RL Infrastructure: Unified System for Personal and General Agents¶
3.1 四个解耦组件的异步流水线¶
OpenClaw-RL 的核心架构理念是完全解耦,将以下四个组件设计为完全独立的异步循环,彼此之间无阻塞依赖:
策略服务(Policy Serving)
环境托管(Environment Hosting)
奖励判断(PRM Judging)
策略训练(Policy Training)
它们之间的数据流如下:
Policy Serving → Environment → Reward Judging → Policy Training
(SGLang) (Http / API) (SGLang / API) (Megatron)
这种异步设计使得每个组件可以并行运行,互不等待。例如,在模型处理新请求的同时,PRM(偏好奖励模型)可以评估之前的响应,训练器可以进行梯度更新。
重点优势:
支持从实时、异构交互流中进行连续训练。
各个交互流无需暂停或批处理来等待其他组件。
对于个性化智能体,通过私有 API 部署,保证安全,且模型更新不会中断推理。
对于大规模通用智能体训练,缓解了长周期 rollout 带来的“长尾问题”。
3.2 面向个性化智能体的会话感知环境服务器¶
个性化智能体的环境是用户的设备,通过私有 API 与 RL 服务器连接。每个 API 请求分为两类:
主线对话(Main-line turn):包含智能体的主要响应和工具执行结果,用于生成训练样本。
旁支对话(Side turn):如辅助查询、记忆整理、环境切换等,仅转发,不用于训练。
关键机制:
RL 框架能精确识别哪些对话属于哪个会话,实现针对性训练。
当前仅对主线对话进行训练。
每个新主线请求中包含对上一轮响应的反馈(用户回复或环境执行结果),作为下一状态信号 \( s_{t+1} \),用于奖励计算。
3.3 可扩展性:从单用户个性化到大规模部署¶
OpenClaw-RL 支持从单用户个性化智能体到大规模多环境通用智能体部署的完整范围。
个性化场景:环境为单个用户设备,交互稀疏、基于会话、高度个性化。
通用场景:基于 slime 框架,继承其可扩展训练能力,并进一步支持云托管环境(见 3.4 节)。
大规模训练能力:
云服务上可运行数百个并行环境。
产生密集的结构化执行信号流,支持可扩展的强化学习训练。
3.4 支持多种现实世界场景¶
OpenClaw-RL 支持多种通用智能体场景,涵盖最常见的现实部署设置(见表1)。
场景 |
环境 |
下一状态信号 |
周期长度 |
|---|---|---|---|
OpenClaw |
个人设备 |
用户响应 / 工具调用结果 |
长 |
终端 |
Shell 执行沙箱 |
stdout/stderr, 退出码 |
长 |
GUI |
屏幕状态 + 辅助树 |
视觉状态差异、任务进度 |
长 |
SWE |
代码仓库 + 测试套件 |
测试结果、diff、静态分析 |
长 |
工具调用 |
API/函数执行 |
返回值、错误追踪 |
中 |
各场景说明:
终端智能体:高效、低成本,适合与 LLM 的文本接口结合。
GUI 智能体:处理视觉界面和指针交互,适用于更通用的计算机任务。
SWE 智能体:通过测试、diff 和静态分析提供丰富的执行反馈,是代码类任务的关键。
工具调用智能体:通过调用外部工具提升推理能力和事实准确性。
3.5 非阻塞记录与可观测性¶
所有交互和奖励评估都实时记录为 JSONL 格式,包括:
完整消息历史
提示/响应文本
工具调用
下一状态内容
PRM 每票评分
选择的提示(OPD)
接受/拒绝决策
关键设计:
非阻塞写入:日志写入在后台线程中“即发即忘”,不增加服务或 PRM 路径的延迟。
日志清理机制:在每次权重更新边界清除记录,确保日志始终对应单一策略版本。
总结图示(图3)¶
图3展示了 OpenClaw-RL 的方法概览:
对于个性化智能体,支持:
二值奖励优化(Binary-reward optimization)
在策略蒸馏训练(On-policy distillation)
实验表明,两者结合显著提升性能。
对于通用智能体强化学习,除了标准 RLVR(Reinforcement Learning with Value Regularization)外,还提供:
逐步骤奖励机制
一种简单但有效的标准化方法 [wang2026rlanything]
总结:
OpenClaw-RL 是一个统一、高效、可扩展的强化学习基础设施,既支持个性化智能体的实时训练,也支持大规模通用智能体的多样化部署。其核心在于异步解耦架构、会话感知机制、多场景兼容性和非阻塞日志系统,为未来智能体系统的持续进化提供了坚实基础。
4. Learning from Next-State Signals: Unified RL Across Interaction Types¶
本章提出了一种统一的强化学习(RL)方法,适用于多种交互类型(如对话、终端交互、GUI、SWE任务、工具调用等),通过将下一状态信号(next-state signals)转化为策略梯度来训练智能体。
4.1 Binary RL for Personal Agent¶
将评估性下一状态信号转化为标量过程奖励(scalar process rewards),用于策略优化。
4.1.1 PRM Judge Construction via Majority Vote¶
使用一个PRM(Process Reward Model)判断模型,根据动作 \( a_t \) 和下一状态 \( s_{t+1} \) 生成奖励 \( r \in \{+1, -1, 0\} \): $\( \text{PRM}(a_t, s_{t+1}) \rightarrow r \in \{+1, -1, 0\} \)$
判断依据:用户反馈或工具调用结果。
为提高鲁棒性,进行多次独立查询,取多数投票结果作为最终奖励: $\( r_{\text{final}} = \text{MajorityVote}(r_1, \ldots, r_m) \)$
4.1.2 RL Training Objective¶
使用PPO风格的裁剪代理目标函数(clipped surrogate objective)进行训练: $\( \rho_t = \frac{\pi_\theta(a_t \mid s_t)}{\pi_{\text{old}}(a_t \mid s_t)},\quad \mathcal{L}_{\text{pg}} = -\mathbb{E}_t\left[\min\left(\rho_t A_t, \text{clip}(\rho_t, 1-\varepsilon, 1+\varepsilon_{\text{high}})\cdot A_t\right)\right] \)\( \)\( \mathcal{L} = \mathcal{L}_{\text{pg}} + \beta_{\text{KL}} \cdot \mathcal{L}_{\text{KL}} \)$
参数设置:\(\varepsilon = 0.2\), \(\varepsilon_{\text{high}} = 0.28\), \(\beta_{\text{KL}} = 0.02\)
与 GRPO 不同,本方法适用于实时对话场景,无法进行标准化处理。
4.2 Hindsight-Guided On-Policy Distillation (OPD) for Personal Agent¶
将方向性下一状态信号转化为token级别的监督信号,提升策略的细粒度控制。
4.2.1 Why Token-Level Supervision from Next-State Signals?¶
标量奖励(Binary RL)丢失了下一状态中丰富的token级修正信息。
例如用户说“你应该先检查文件”,不仅说明错误,还指出了应修改的token。
4.2.2 Token-Level OPD¶
Step 1. Hindsight hint extraction¶
判断模型输出: $\( \text{Judge}(a_t, s_{t+1}) \rightarrow \{\text{score} \in \{+1, -1\}, \text{hint} \in \mathcal{T}^*\} \)$
若 score = +1,则生成一个简洁的 hint,封装在 [HINT_START]…[HINT_END] 中。
不直接使用 \( s_{t+1} \),而是由 judge 提取关键指令,避免噪声干扰。
Step 2. Hint selection and quality filtering¶
从多个 hint 中选择最长且有效的 hint(信息量最大)。
若无有效 hint,则丢弃该样本,强调信号质量而非数量。
Step 3. Enhanced teacher construction¶
将 hint 附加到用户消息中,构造增强提示: $\( s_{\text{enhanced}} = s_t \oplus \text{hint} \)$
Step 4. Token-level advantage¶
在增强提示下,计算 token 级优势: $\( A_t = \log \pi_{\text{teacher}}(a_t \mid s_{\text{enhanced}}) - \log \pi_\theta(a_t \mid s_t) \)$
\( A_t > 0 \):应提高该 token 概率;\( A_t < 0 \):应降低该 token 概率。
相比于标量优势,提供更细粒度的指导。
4.3 Combine Binary and OPD Methods¶
结合 Binary RL 与 OPD 的优势,形成统一训练策略。
维度 |
Binary RL |
OPD |
Combined |
|---|---|---|---|
信号类型 |
评估型(好坏) |
方向型 |
评估+方向 |
优势 |
序列级标量 |
token级方向 |
混合序列+token级 |
密度 |
所有评分回合 |
有hint的回合 |
所有评分回合 |
反馈类型 |
用户/环境 |
明确修正 |
显式+隐式 |
信号丰富度 |
每样本1个标量 |
每token1个值 |
每token1个值 |
Binary RL:覆盖广,适用于所有评分回合,无需 hint。
OPD:精度高,适用于有明确修正信号的回合。
联合训练:使用加权优势函数: $\( A_t = w_{\text{binary}} r_{\text{final}} + w_{\text{opd}} \left(\log \pi_{\text{teacher}}(a_t \mid s_{\text{enhanced}}) - \log \pi_\theta(a_t \mid s_t)\right) \)\( 默认 \) w_{\text{binary}} = w_{\text{opd}} = 1 $
4.4 Step-wise Reward for General Agentic RL¶
在长周期任务中,如何结合过程奖励与结果奖励?
4.4.1 Why Process Rewards Are Vital for Agentic Tasks¶
结果奖励(outcome-only)仅在最后一步提供梯度信号,中间步骤无监督。
过程奖励(process reward)在每一步都提供反馈,实现密集信用分配(dense credit assignment)。
实验表明,结合 step-wise PRM 信号与 outcome 奖励,显著优于仅使用结果奖励(RLAnything)。
4.4.2 Integrate Outcome and Process Rewards¶
奖励计算方式: $\( R_t = o + \frac{1}{m} \sum_{i=1}^{m} r_i \)\( 其中 \) r_i $ 是 PRM 对每一步的打分。
与 GRPO 不同,本方法按 step index 分组进行标准化,适用于真实场景(如终端代理)中难以聚类的状态。
总结¶
第4章提出了一种基于下一状态信号的统一强化学习框架,涵盖以下核心方法:
Binary RL:将评估信号转化为标量奖励,适用于所有评分回合。
OPD:提取方向性 hint,生成 token 级别优势,提升策略细粒度。
联合训练:结合 Binary RL 与 OPD,兼顾广度与精度。
Step-wise Reward:在长周期任务中引入过程奖励,提升训练效率。
这些方法共同构成了一个适用于多种交互类型的通用 RL 框架,为 OpenClaw-RL 的实际应用提供了理论基础和实现路径。
5 Experiments¶
本章从两个互补的轨道评估 OpenClaw-RL:个人代理轨道(Personal Agent Track)和通用代理轨道(General Agent Track),两者共享相同的基础设施和训练流程。
5.1 个人代理设置(Personal Agent Setup)¶
优化效果通过仿真结果验证。
5.1.1 使用 OpenClaw 做作业的学生代理¶
目标:模拟学生使用 OpenClaw 完成作业,同时避免被识别为 AI 生成内容。
任务来源:GSM8K 数据集。
模型:Qwen3-4B。
训练参数:学习率 1×10⁻⁵,KL 系数为 0,每收集 16 个样本触发一次训练。
关键点:学生偏好决定输出是否像 AI 生成,强调个性化。
5.1.2 使用 OpenClaw 批改作业的教师代理¶
目标:生成具体且友好的反馈。
模型与参数:同上。
重点:提升反馈的自然性和友好度。
5.2 通用代理设置(General Agent Setup)¶
5.2.1 模型¶
终端代理:Qwen3-8B
GUI 代理:Qwen3VL-8B-Thinking
SWE 代理:Qwen3-32B
工具调用代理:Qwen3-4B-SFT
PRM(过程奖励模型):
GUI:Qwen3VL-8B-Thinking
工具调用:Qwen3-4B
5.2.2 数据集¶
代理类型 |
训练数据 |
评估数据 |
|---|---|---|
终端 |
SETA RL |
同训练集 |
GUI |
OSWorld-Verified |
排除 chrome 和多应用任务 |
SWE |
SWE-Bench-Verified |
同训练集 |
工具调用 |
DAPO RL |
AIME 2024 |
5.2.3 超参数¶
学习率:10⁻⁶
KL 系数:0.01
Clip ratio:下限 0.2,上限 0.28
采样任务数:
GUI/SWE:8 个/步
终端:16 个/步
工具调用:32 个/步
每任务采样数:8 个
最大交互步数:
GUI:30
SWE:20
终端:10
5.3 个人代理轨道:从对话信号中学习(Learning from Conversational Signals)¶
核心结论:¶
Q1:二值 RL vs. 在线蒸馏(OPD)
结论:结合方法效果最佳,OPD 优于二值 RL,但因训练样本稀疏,效果显现较慢。
数据支持:见表3。
表3:不同方法在优化 OpenClaw 上的表现(基础分 0.17)
方法 |
更新8步 |
更新16步 |
|---|---|---|
Binary RL |
0.25 |
0.23 |
OPD |
0.25 |
0.72 |
Combined |
0.76 |
0.81 |
Q2:OpenClaw-RL 是否随时间提升个性化?
结论:学生代理在 36 次互动后避免 AI 风格表达;教师代理在 24 次互动后写出更友好、具体的反馈。
图示支持:图2(Introduction 部分)。
5.4 通用代理:统一的终端、GUI、SWE 和工具调用 RL(Unified RL Across Terminal, GUI, SWE, and Tool-Call)¶
核心结论:¶
Q3:OpenClaw-RL 是否具备通用代理 RL 框架的竞争力?
结论:支持多种代理设置(终端、GUI、SWE、工具调用),具备大规模环境并行能力。
图示支持:图4。
Q4:过程奖励模型(PRM)是否对长任务至关重要?
结论:整合过程与结果奖励提升优化效果,但需更多资源。
数据支持:见表4。
表4:整合结果与过程奖励的表现
设置 |
整合奖励 |
仅结果奖励 |
|---|---|---|
工具调用 |
0.30 |
0.17 |
GUI |
0.33 |
0.31 |
总结¶
OpenClaw-RL 在两个轨道上均表现出色:
个人代理轨道:通过对话信号实现个性化优化,结合 OPD 与二值 RL 的方法效果最佳。
通用代理轨道:支持多种代理类型(终端、GUI、SWE、工具调用),整合 PRM 显著提升长任务表现,具备大规模并行训练能力。
7 Conclusion¶
本节总结了 OpenClaw-RL 的核心思想与成果。
核心观点:¶
每个智能体(agent)的交互都会产生一个下一状态信号(next-state signal),该信号编码了智能体的表现情况,以及它本应如何采取不同行动。
OpenClaw-RL 的核心洞察是:这些信号不依赖于交互流(stream-agnostic),即它们可以跨不同类型交互统一使用,一个策略(policy)可以同时从所有这些信号中学习。
交互类型:¶
以下多种交互方式产生的数据都被统一用于训练:
个人对话(Personal conversations)
终端执行(Terminal executions)
图形界面交互(GUI interactions)
软件工程任务(SWE tasks)
工具调用轨迹(Tool-call traces)
这些数据统一进入同一个训练流程,实现了多任务、多模态的学习。
学习方法:¶
Binary RL:将评估性信号(evaluative signals)转化为标量过程奖励(scalar process rewards)。
OPD(Online Policy Distillation):将指导性信号(directive signals)转化为token 级别的优势监督(token-level advantage supervision)。
两者结合带来了显著的优化提升。
最终成果:¶
模型能够在同一训练过程中:
对不同用户进行个性化(personalization)
提升在长视野智能体任务(long-horizon agentic tasks)上的表现
所有训练数据均来自模型实际交互过程,无需额外标注或监督信号。
总结:¶
OpenClaw-RL 提出了一种统一的学习框架,通过整合多种交互信号,实现了个性化与任务能力的同步提升,展示了在真实交互数据驱动下智能体学习的潜力。
Appendix A Algorithm Pseudocode¶
Algorithm 1 Binary RL Pipeline(每轮主流程,双轨制)¶
该算法描述了在每轮交互中,如何收集数据、使用策略生成动作、记录日志概率,并通过 PRM(偏好奖励模型)进行评估,最终提交样本用于训练。
重点步骤:
第1行: 使用
SGLang模型根据当前消息ℳt生成动作at和旧日志概率logpold。第2行: 将
prompt_ids、response_ids和logpold缓存起来,用于后续训练。第4行: 在下一轮中,从
ℳt+1提取下一个状态st+1(即用户反馈或环境反馈)。第5行: 使用 PRM(偏好奖励模型)对动作
at和状态st+1进行并行评估,得到m个评分ri。第6行: 对
ri进行多数投票,得到最终奖励r。第7行: 将奖励
r广播给所有相关样本。第8行: 如果当前轨迹
𝒯中没有有效样本,则应用“至少一个”保证机制(防止数据缺失)。第9行: 将样本提交至训练队列。
说明:
该流程适用于强化学习中的数据收集与奖励估计,结合了语言模型(SGLang)、奖励模型(PRM)和轨迹处理。
多数投票机制增强了评估的鲁棒性。
异步并行评分(第5行)提高了效率。
Algorithm 2 OPD Pipeline(个性化代理轨道)¶
该算法描述了在个性化代理训练中,如何使用 Judge 模块评估动作,筛选有效反馈,并通过 Teacher 模型生成增强后的日志概率,用于优势估计。
重点步骤:
第1行: 输入当前动作
at、消息ℳt和旧日志概率logpold,以及下一状态st+1。第1行(续): 使用
Judge模块对(at, st+1)进行评估,返回m个评分scorei和对应的反馈hinti。第2行: 筛选出评分
+1且反馈长度大于10的hint,组成valid集合。第3–6行: 如果没有有效反馈(
valid为空),则丢弃该样本。第7行: 选择最长的
hint作为最终反馈。第8行: 将原始消息
ℳt与反馈hint合并,形成增强状态senhanced。第9行: 使用
Teacher模型在增强状态下生成当前动作at的新日志概率logπ_teacher。第10行: 计算优势值
At[k] = logπ_teacher[k] - logpold[k]。第11行: 将包含教师日志概率的样本提交至训练队列。
说明:
OPD(Online Policy Distillation)机制通过反馈增强提升策略质量。
Judge负责筛选有效反馈,Teacher负责生成更优策略分布。优势估计基于教师模型与原始策略的对数概率差,用于策略更新。
总结:
Algorithm 1 是一个基于 PRM 的强化学习数据收集与奖励估计流程,适用于双轨训练。
Algorithm 2 是 OPD 机制下的个性化代理训练流程,利用反馈增强和教师模型提升策略质量。
两者都强调了异步并行处理、反馈筛选和优势估计的重要性。
Appendix B More Optimization Examples¶
B.1 学生设置¶
示例 1(优化前后对比)¶
优化前:
一个六面骰子掷出大于3的概率是 50%(数字4、5、6,共3个)。
连续两次掷出偶数的概率是 25%(每次有3个偶数,概率为 3/6 × 3/6 = 1/4)。
两者概率差为 25个百分点(50% - 25%)。
使用相对百分比增长表示: $\( \frac{50\% - 25\%}{25\%} \times 100\% = 100\% \)$
答案: 100% 更有可能。
优化后:
详细解释了每个计算步骤:
大于3的概率:3/6 = 50%
两次偶数的概率:(3/6) × (3/6) = 25%
相对差异:(50% - 25%) / 25% = 100%
结论: 答案为 100%。
示例 2(优化前后对比)¶
优化前:
Sara总共需要 \(70(夹克 \)30 + 两双鞋各 $20)。
她已有 \(10,通过 babysitting 赚了 \)20(4 次 × \(5),共 \)30。
还需 $40。
每次割草赚 \(4 → \)40 / $4 = 10次。
答案: Sara 需要割草 10次。
优化后:
明确拆解了每一步:
总费用:\(30(夹克)+ 2×\)20(鞋)= $70
已有资金:\(10 + 4×\)5 = $30
还需:\(70 - \)30 = $40
割草次数:\(40 / \)4 = 10次
结论: 答案为 10次。
B.2 教师设置¶
示例 1(优化前后对比)¶
优化前:
回答正确,评价为“做得好”。
优化后:
给出详细反馈:
表扬学生分步计算 20 + 44 = 64,再计算 100 - 64 = 36 的逻辑清晰。
强调理解问题结构的能力。
结论: 强化了学生解题过程的肯定。
示例 2(优化前后对比)¶
优化前:
正确答案:189小时
优化后:
详细反馈:
正确将 3 周转换为 21 天(关键步骤)。
计算每位油漆工工作时间为 21 × (3/8) 天。
转换为小时:21 × (3/8) × 24 = 189 小时。
不需要除以4,因为题目问的是“每位油漆工”。
结论: 答案为 189小时,并给予高度评价。
总结¶
学生部分:优化后更清晰地展示了数学计算过程,强调关键步骤和逻辑推理。
教师部分:优化后提供了更具体的反馈,强化了学生对问题结构的理解和执行能力。
所有示例都保持了原题结构,重点内容(如公式、步骤、答案)被详细讲解,次要内容则精简处理。
Appendix C Prompt Templates¶
C.1 个性化代理:PRM 判定提示(Binary RL, Personal)¶
内容总结:¶
该提示模板用于训练或评估一个过程奖励模型(PRM),用于判断AI助手的输出质量。
输入:助手的输出 + 用户后续反馈。
任务:根据反馈判断输出质量,给出评分。
有效评分:
\(\boxed{1}\):好(符合用户反馈)
\(\boxed{-1}\):差(与反馈不符)
\(\boxed{0}\):中性(无明显优劣)
重点:¶
强调“逐步思考”后给出最终评分。
适用于个性化场景,即用户反馈对输出质量有直接影响。
C.2 个性化代理:OPD 回顾提示(OPD Hindsight Hint Prompt)¶
内容总结:¶
该模板用于提取回顾性提示(hindsight hint),帮助模型在后续步骤中改进输出。
输入:当前输出 + 下一状态(next state)。
任务:
判断下一状态是否提供了有用的信息来改进当前输出。
如果有,输出 \(\boxed{1}\) 并提供一个具体、可操作的提示(1-3句话)。
如果没有,输出 \(\boxed{-1}\),不提供提示。
重点:¶
提示必须具体,不能模糊。
用于训练模型在生成过程中利用后续信息进行调整(OPD:Offline Policy Distillation)。
C.3 个性化代理:模拟器评估提示(Personalization Score Prompt)¶
内容总结:¶
用于评估助手的首次响应是否符合用户的个性化偏好。
输入:
问题
助手的首次响应
用户偏好([PREFERENCE])
输出:一个评分,从以下中选择:
\(\boxed{0}\), \(\boxed{0.5}\), \(\boxed{0.75}\), \(\boxed{1}\), \(\boxed{2.5}\)
评分标准:
高分:响应风格、语气、细节、格式与偏好一致
低分:响应不符合用户期望
重点:¶
仅评估首次响应
不提供解释,只输出评分
用于衡量个性化匹配程度
C.4 通用代理:PRM 判定提示(General Agent: PRM Judge Prompt)¶
内容总结:¶
该模板用于评估终端代理、GUI代理和软件工程代理的最新一步操作是否有效。
C.4.1 终端代理(Terminal)¶
输入:¶
任务指令
交互历史
当前步骤(包括助手文本、工具调用、工具结果)
输出评分规则:¶
+1:如果满足以下所有条件:
当前步骤是正确/有帮助的
工具调用格式正确
工具使用合理
工具结果表明有进展
-1:否则(如错误、格式错误、无效工具调用、无进展)
C.4.2 GUI代理(Graphical User Interface)¶
输入:¶
历史动作 + 图像
当前观察 + 图像
当前动作(含推理)
执行后的下一状态图像
输出评分规则:¶
+1:如果满足以下所有条件:
步骤与目标相关
动作在下一状态中可执行且合理
下一状态显示有进展
-1:否则(如无关、无效、无变化、倒退)
C.4.3 软件工程代理(SWE)¶
输入:¶
GitHub问题描述
历史步骤摘要
当前步骤(含推理 + bash命令)
命令执行结果(返回码 + 输出)
输出评分规则:¶
+1:如果满足以下所有条件:
命令执行无意外错误(returncode=0 或预期非零)
步骤与诊断/修复问题相关
输出提供有用信息或编辑逻辑正确
-1:否则(如命令失败、无关步骤、重复尝试、引入新bug、浪费步骤)
总结¶
模板类型 |
用途 |
输出评分 |
特点 |
|---|---|---|---|
PRM Judge (Personal) |
评估个性化输出质量 |
\(\boxed{1}, \boxed{-1}, \boxed{0}\) |
基于用户反馈判断 |
OPD Hindsight Hint |
提取回顾性提示 |
\(\boxed{1}, \boxed{-1}\) |
提供具体可操作建议 |
Personalization Score |
评估个性化匹配度 |
\(\boxed{0}, \boxed{0.5}, \boxed{0.75}, \boxed{1}, \boxed{2.5}\) |
仅评估首次响应 |
PRM Judge (Terminal) |
评估终端代理步骤 |
+1 / -1 |
判断是否推进任务 |
PRM Judge (GUI) |
评估GUI代理步骤 |
+1 / -1 |
结合图像状态判断 |
PRM Judge (SWE) |
评估软件工程代理 |
+1 / -1 |
结合命令执行结果判断 |
重点内容:¶
多数模板采用二元评分(+1/-1)或有限离散评分。
强调具体、可操作的反馈(如OPD提示)。
评估逻辑基于是否推进任务、是否符合用户偏好、是否执行成功。
涉及图像、命令行、GUI等多模态输入的处理。
Appendix D Hyperparameters¶
本节提供了不同实验设置下的完整超参数表格(表5),并对其进行了详细说明。
表5:不同设置下的超参数表¶
参数 |
值 |
说明 |
|---|---|---|
优化器(Optimizer) |
||
学习率(Learning rate) |
\(1 \times 10^{-6}\) |
恒定衰减 |
权重衰减(Weight decay) |
0.1 |
|
Adam 参数 \(\beta_1, \beta_2\) |
0.9, 0.98 |
|
策略梯度(Policy gradient) |
||
KL 系数 \(\beta_{\text{KL}}\) |
0.01 |
使用低方差 KL 散度(k3) |
Clip 参数 \(\varepsilon / \varepsilon_{\text{high}}\) |
0.2 / 0.28 |
非对称 PPO(asymmetric PPO) |
熵系数(Entropy coefficient) |
0.0 |
熵最大化被禁用 |
Rollout( rollout 过程) |
||
批量大小(Batch size) |
8(GUI, SWE)、16(终端)、32(工具调用) |
不同任务类型使用不同批量大小 |
每个任务采样数(Sample per task) |
8 |
|
最大响应长度(Max response length) |
8192 tokens |
|
最大上下文长度(Max context length) |
16384 tokens |
|
最大交互步数(Max interactive steps) |
30(GUI)、20(SWE)、10(终端) |
|
温度参数(Temperature) |
1.0 |
|
PRM / 评判器(Judge) |
||
投票数 \(m\) |
3(GUI)、1(其他) |
使用多数投票机制(majority vote) |
温度参数(Temperature) |
0.6 |
|
最大生成 token 数(Max new tokens) |
4096(RL)、8192(OPD) |
|
最小提示长度(Min hint length) |
10 个字符 |
OPD 质量过滤器 |
重点内容解析:¶
优化器设置:
使用了 Adam 优化器,学习率为 \(1 \times 10^{-6}\),权重衰减为 0.1,动量参数 \(\beta_1=0.9, \beta_2=0.98\),适用于大多数深度学习训练任务。
策略梯度设置(Policy Gradient):
KL 系数 \(\beta_{\text{KL}} = 0.01\),用于控制 KL 散度的惩罚项,防止策略更新过大。
使用了非对称 PPO 的 clip 参数(\(\varepsilon=0.2, \varepsilon_{\text{high}}=0.28\)),允许在更新策略时对正负偏差采用不同的限制。
熵系数设为 0,表示在训练中不鼓励探索。
Rollout 设置:
批量大小根据任务类型变化,GUI 和 SWE 任务较小(8),终端任务较大(16),工具调用最大(32)。
最大响应长度和上下文长度分别为 8192 和 16384 tokens,说明模型支持长文本生成。
最大交互步数因任务而异,GUI 最多 30 步,SWE 20 步,终端任务仅 10 步。
PRM / 评判器设置:
在 GUI 任务中使用 3 次投票(\(m=3\))进行多数投票判断,其他任务仅 1 次。
生成时使用较低的温度(0.6),以提高输出的确定性。
RL 和 OPD 模式下最大生成 token 数不同,RL 为 4096,OPD 为 8192。
OPD 中设置了最小提示长度(10 个字符),作为质量过滤条件。
总结:¶
本附录提供了完整的超参数配置,涵盖了优化器、策略梯度、rollout 和评判器等多个方面。其中,不同任务类型(GUI、SWE、终端、工具调用)在批量大小、最大交互步数等方面有差异化设置,体现了模型在不同应用场景下的适应性。重点参数如 KL 系数、clip 参数、投票机制等对训练稳定性和评估准确性有重要影响。