图解物联网¶
时间:
著:2015-03
译:2017-04
第1章 物联网的基础知识¶
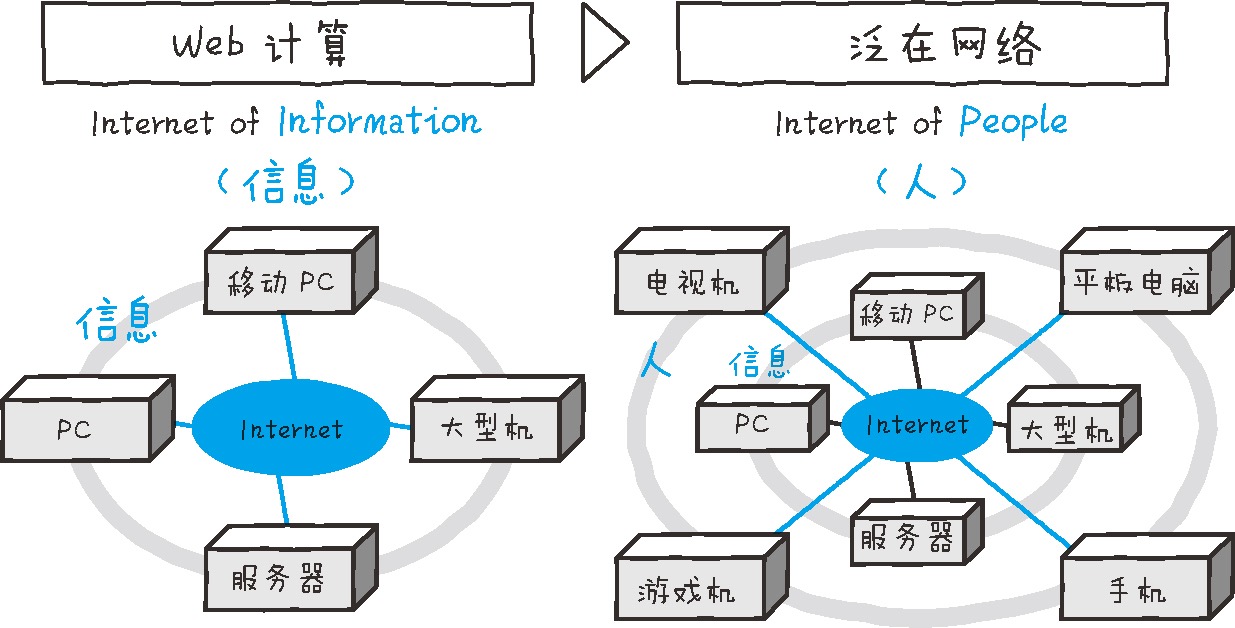
泛在网络可以让人们随时随地访问网络¶
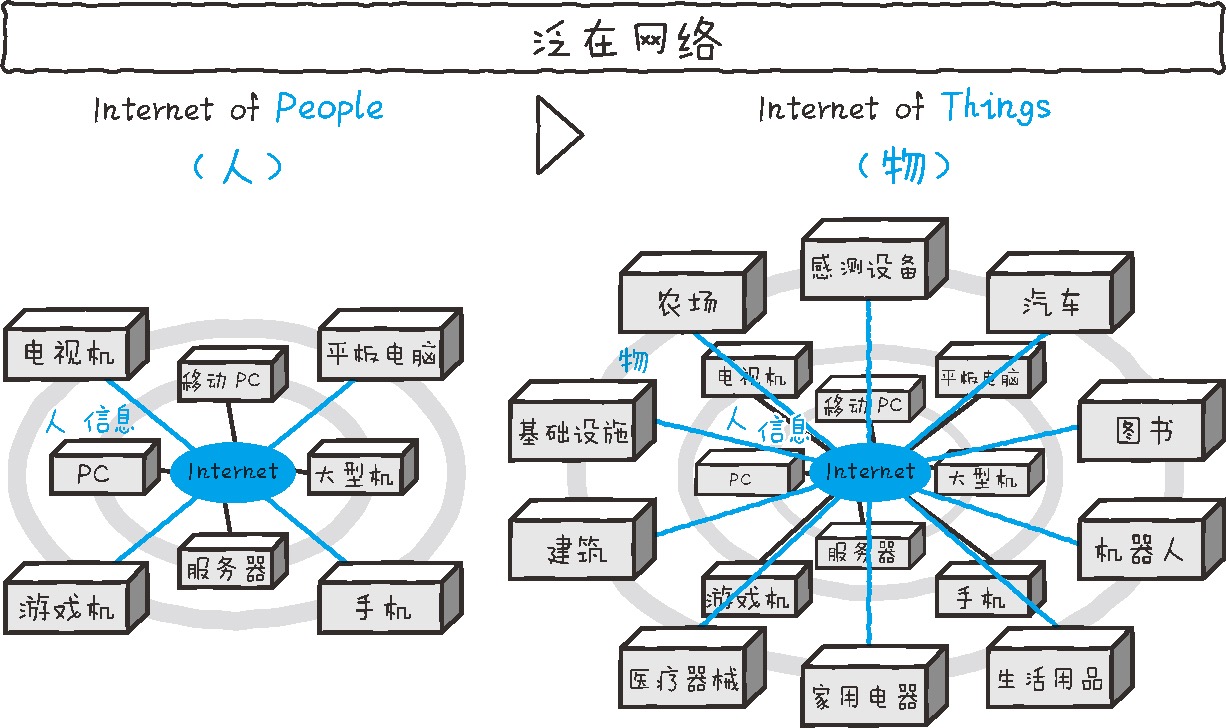
连接互联网的各种各样的“物”¶
2013年12月,在美国高通公司的支持下,家电厂商的横向性物联网推进联盟AllSeen Alliance成立了。该联盟的意图在于越过厂商这道高墙,规划一种统一规格,让冰箱、烤箱及电灯等所有电器都能通过互联网实现协作。 2014年7月,在英特尔和三星的推动下,物联网联盟OIC成立了。该联盟旨在为物联网相关机器的规格和认证设立标准。
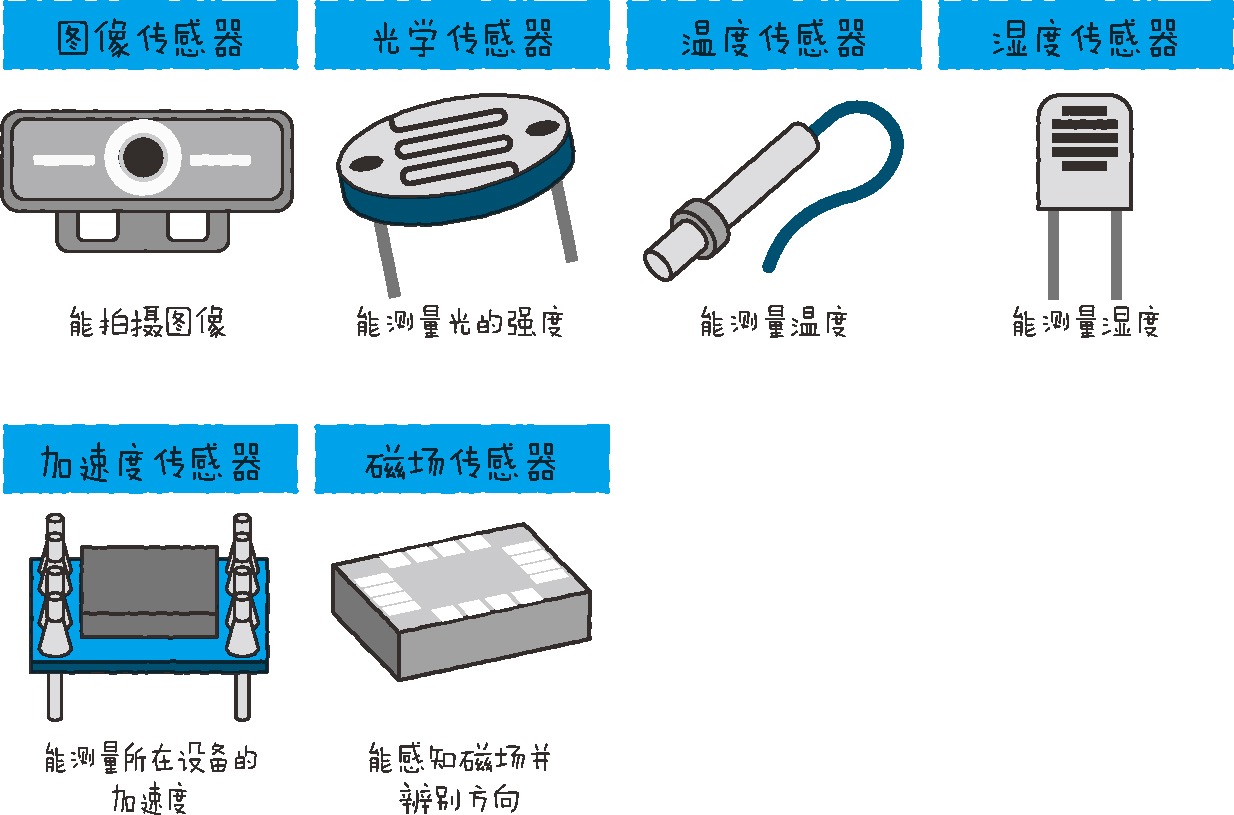
具有代表性的传感器的种类¶
第 2 章 物联网的架构¶
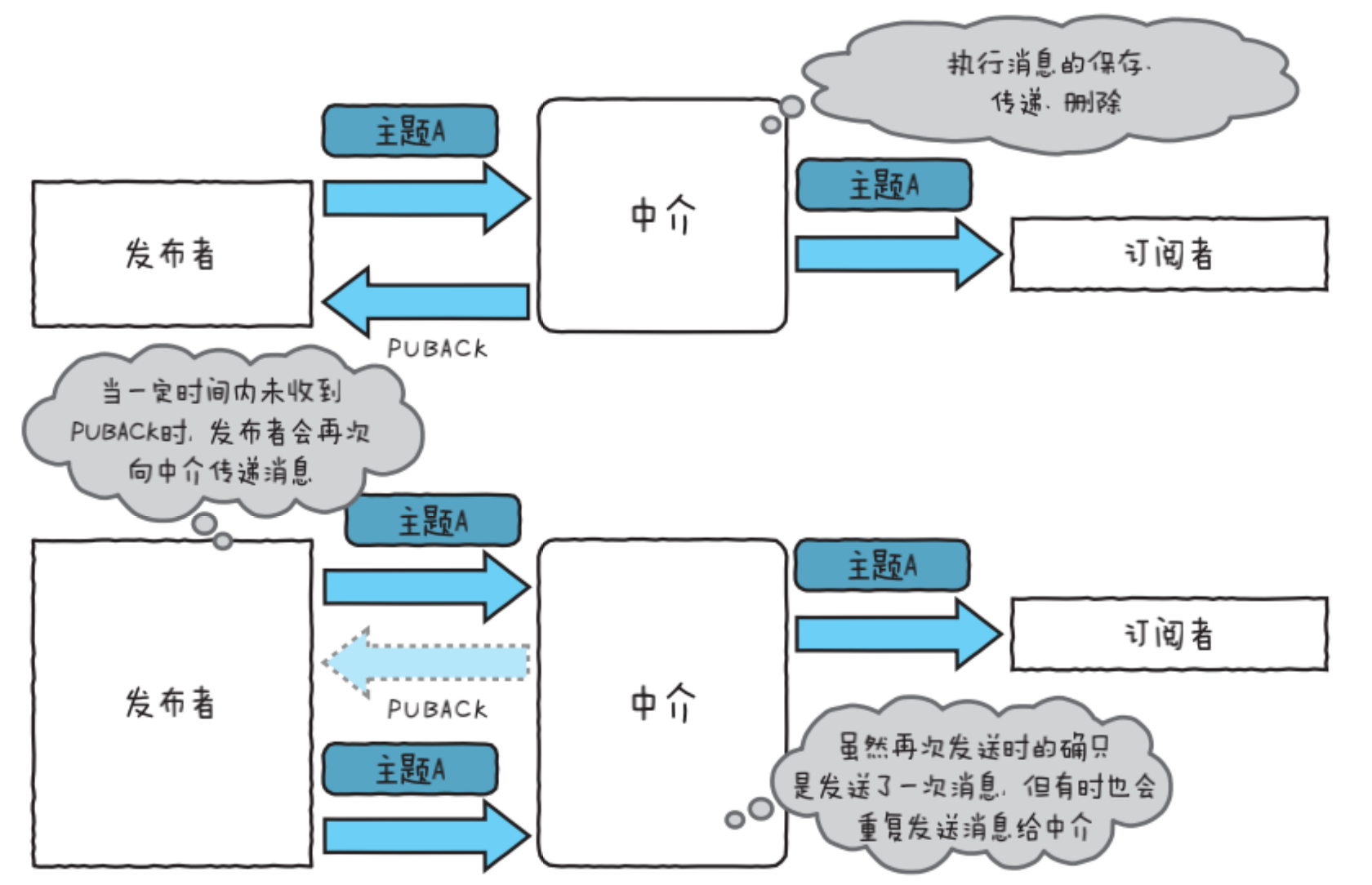
QoS 1: 中介一接收到消息就会向发布者发送一个叫作“PUBACK 消息”的响应,除此之外还会根据订阅者指定的 QoS 发送消息。当发生故障,或经过一定时间后仍没能确认 PUBACK 消息时,发布者会重新发送消息。如果中介接收了发布者发来的消息却没有返回 PUBACK,那么中介会重复收到消息。¶
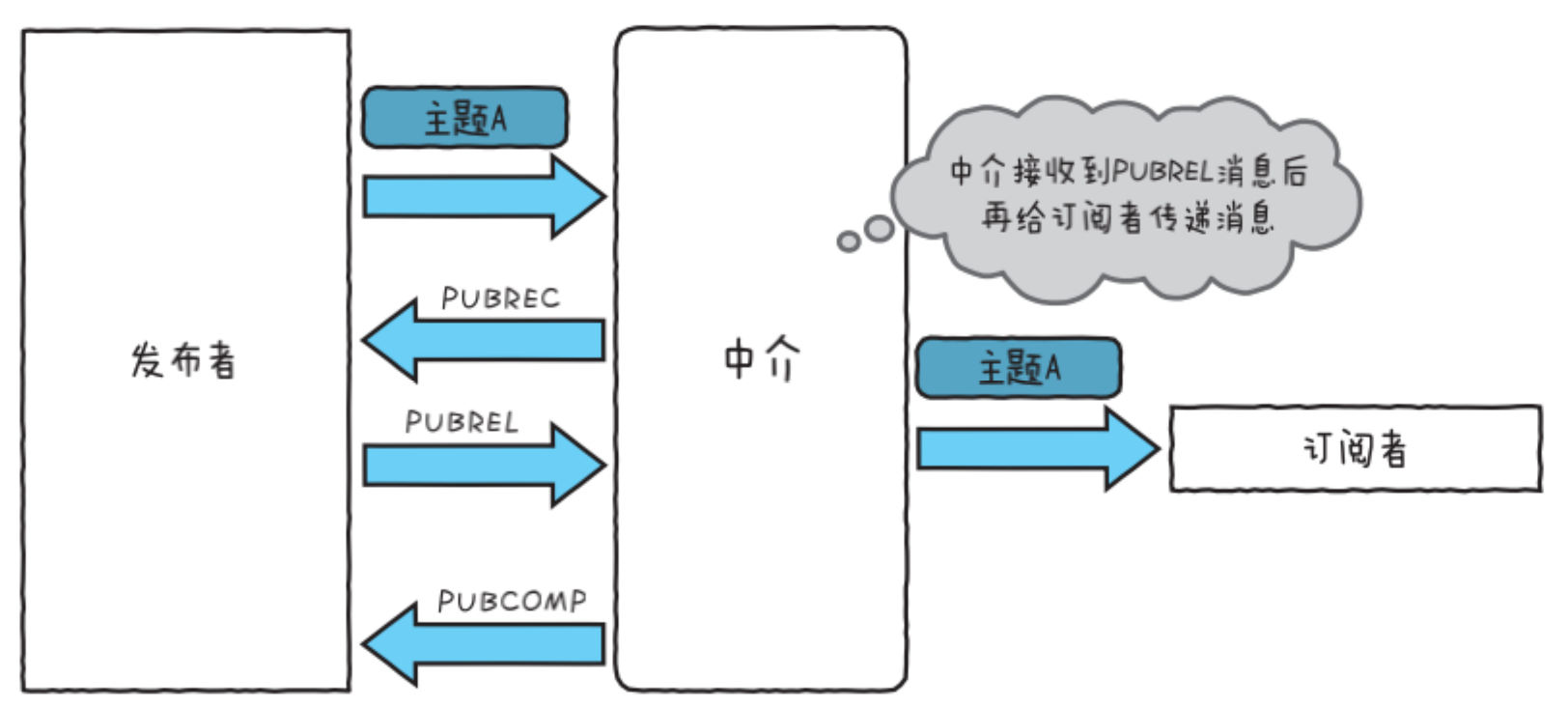
用QoS 2 发送的消息里面含有消息 ID。中介收到消息后会将消息保存,然后给发布者发送 PUBREC 消息。发布者再给中介发送 PUBREL 消息,然后中介会给发布者发送 PUBCOMP 消息。接下来中介才会依据订阅者指定的 QoS,向订阅者传递接收到的消息。¶
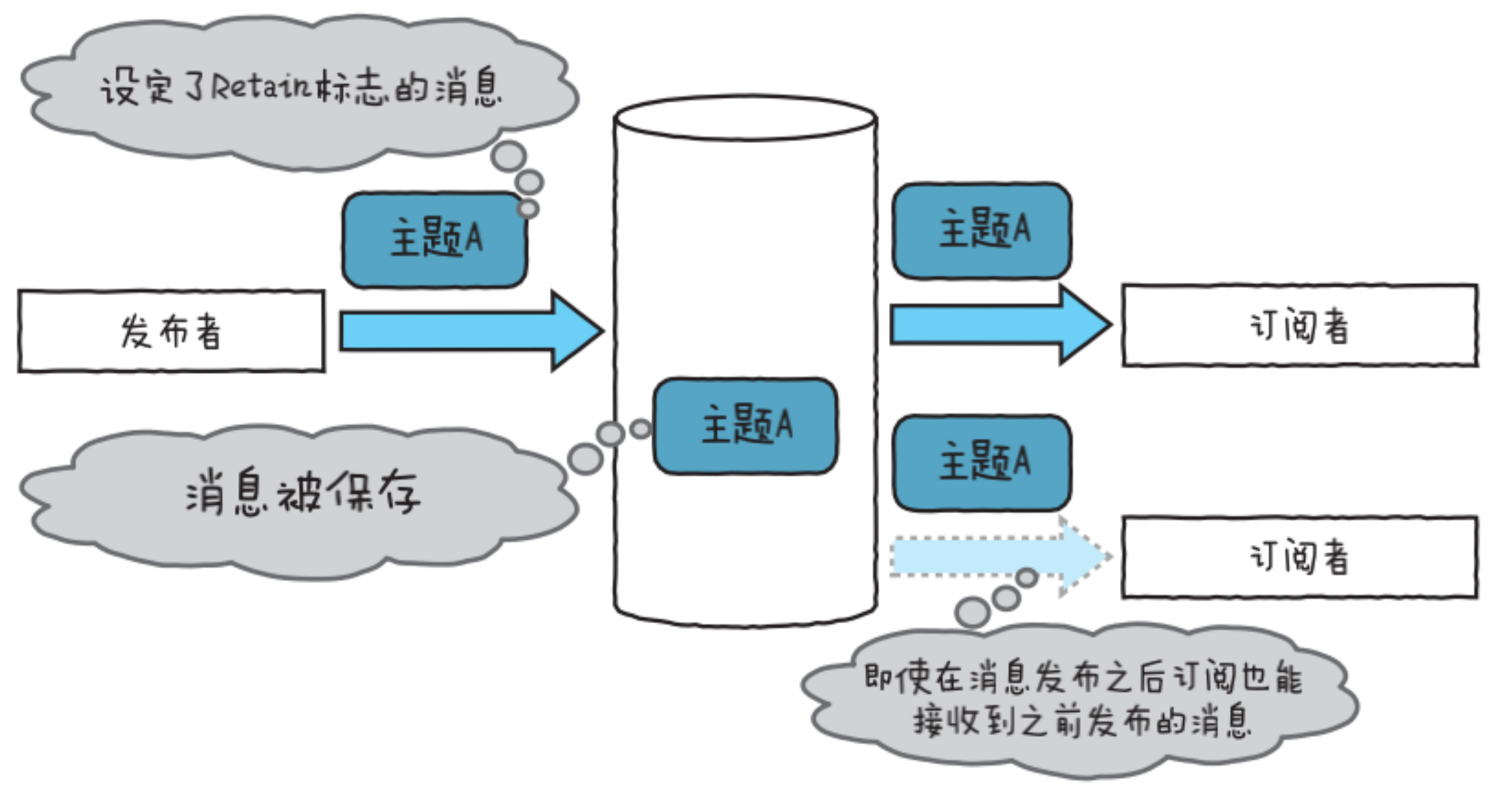
Retain: 订阅者只能接收在订阅之后发布的消息,但如果发布者事先发布了带有 Retain 标志的消息,那么订阅者就能在订阅后马上收到消息。当发布者发布了带有 Retain 标志的消息时,中介会把消息传递给订阅了主题的订阅者,同时保存带有 Retain 标志的最新的消息。此时,若别的订阅者订阅了主题,就能马上收到带有 Retain 标志的新消息¶
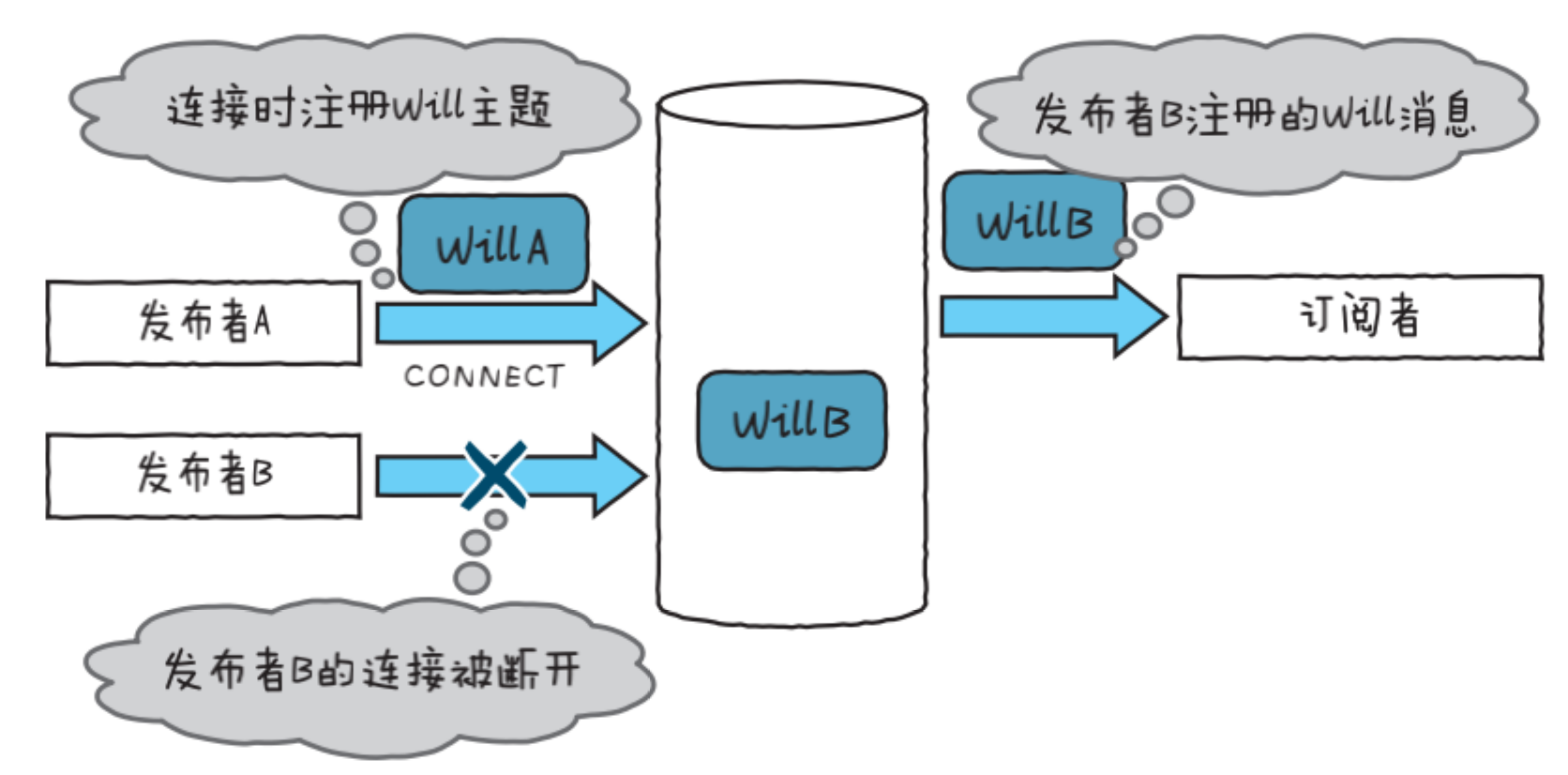
Will: 有“遗言”的意思。由于中介的 I/O 错误或网络故障等情况,发布者可能会突然从中介断开,Will 就是专门针对于这种情况的一个机构,它用于定义中介向订阅者发送的消息。发布者在连接中介时会用到 CONNECT(连接)消息,连接时对其指定 Will 标志、要发送的消息以及 QoS。这样一来,如果连接意外断开,Will 消息就会被传递给订阅者。另外,还有一个标志叫作 Will Retain。通过指定这个标志,就能跟前面说的 Retain 达到同样的效果,即在中介处保存消息。但当发布者使用 DISCONNECT(断开连接)消息明确表明连接已断开时,Will 消息就不会被发送给订阅者。¶
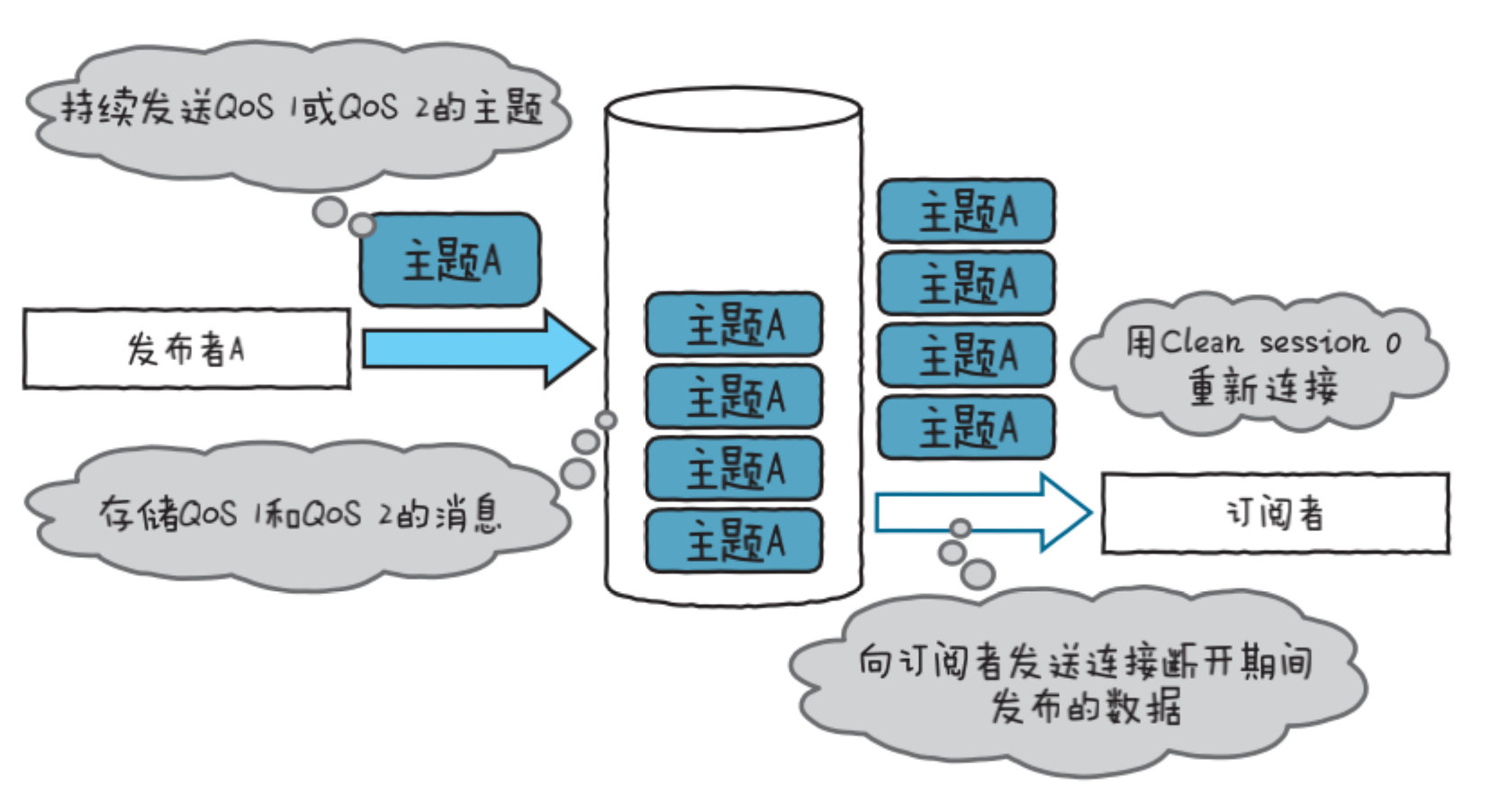
Clean session 用于指定中介是否保留了订阅者的已订阅状态。用CONNECT 消息连接时,订阅者把 Clean session 标志设定为 0 或 1。0是保留 session,1 是不保留 session。
若指定 Clean session 为 0 且中介已经连接上了订阅者,则中介需要在订阅者断开连接后保留订阅的消息。另外,如果订阅者的连接已经断开,且发布者已经发布了 QoS 1、QoS 2 的消息给已订阅的主题时,中介则会把消息保存,等订阅者再次连接时发送给订阅者。
若指定 Clean session 为 1 并连接,中介就会废弃以往保留的客户端信息,将其当成一次“干净”的连接来看待。此外,订阅者断开连接时,中介也会废弃所有的信息。
第 3 章 物联网设备¶
过去,微控制器主板的目标在于搭载单片机,实现结构的简约性和高通用性。与此同时,用在移动电话和智能手机上的高性能 CPU、完善的 I/O 端口,以及配备了网络接口的超微型计算机,即单板计算机等设备陆续登场。使用者不但能通过 Linux 操作系统来运行这些单板计算机,还能像控制以往的微控制器那样控制 I/O 引脚(pin)。微控制器主板和计算机的分界线正在逐渐模糊。
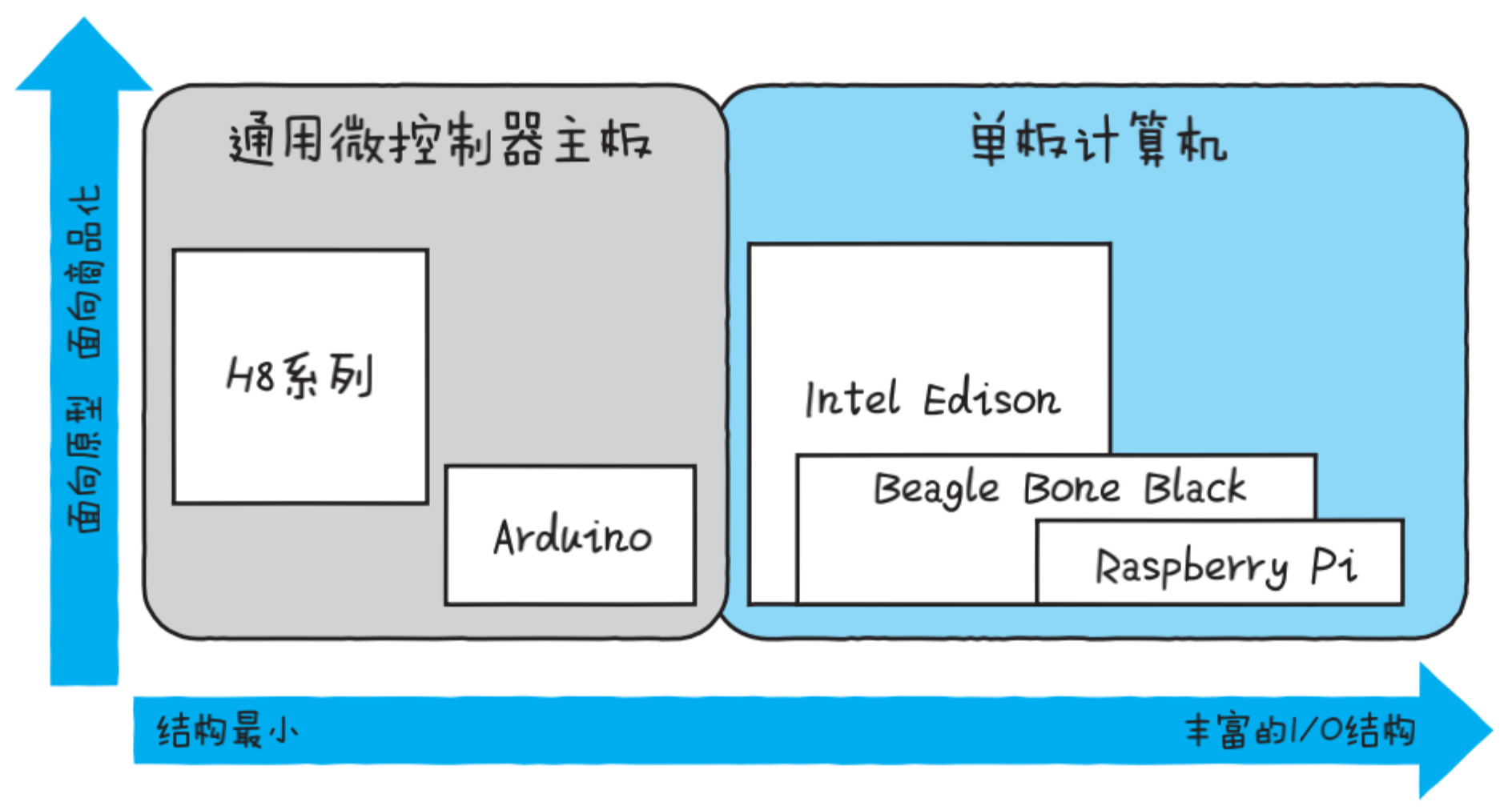
微控制器主板间的比较¶
连接¶
有线连接:
1. 以太网
2. 串行通信
采用 RS-232C 串口线等串行通信
设备大多使用 D-SUB 9 针端口
串口线包括直通线和交叉线两种
3. USB
无线连接:
1. Wi-Fi
2. 3G/LTE
3. 蓝牙
4. IEEE 802.15.4/ZigBee
5. 易能森(EnOcean)
利用能量采集技术自主发电
如:
开关就是用按下开关的力量发电通信的
温度传感器则是利用太阳光进行发电并通信的
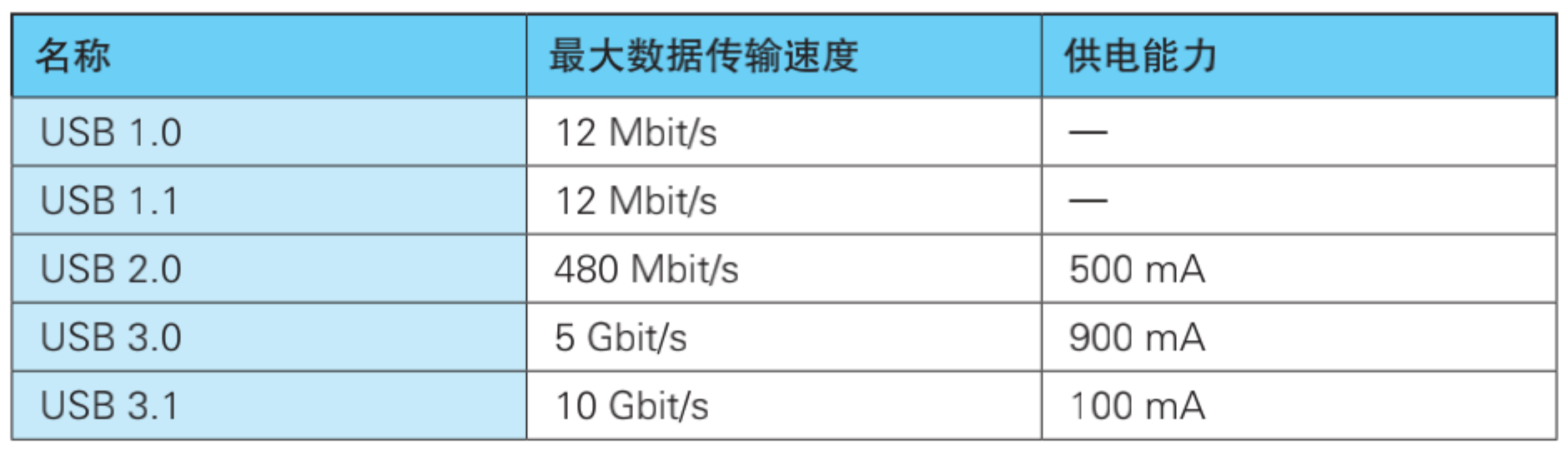
USB 的规格、传输速度及供电能力¶
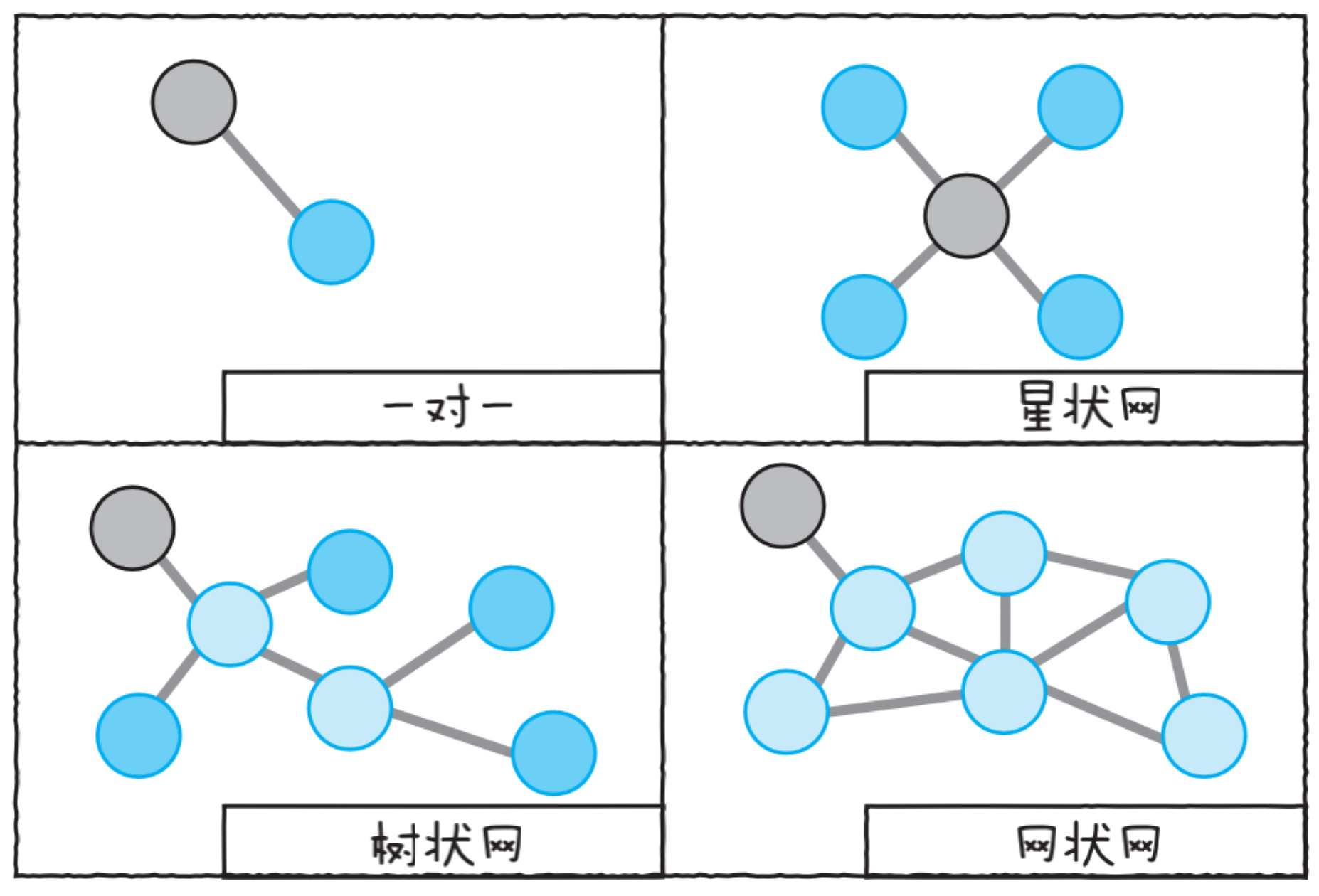
ZigBee 的网络形式¶
输入-传感器¶
传感器的机制:
两种感测方法:
①利用物理特性的传感器
②利用几何变异的传感器
放大传感器的信号:
1. 反相放大电路:反转极性(把正负极反过来)并输出放大的值
2. 差分放大电路:把两个输入电压的差值放大并输出
把模拟信号转换成数字信号:
A/D 转换操作分成以下 3 个步骤。
1. 采样(sampling) 用某个频率来区分模拟输入信号,获取值
2. 量化 把采样后的值近似表现为离散值
3. 编码(coding) 把量化后的数值编码成二进制代码
输出-驱动¶
驱动就好比是水管的水龙头,微控制器自身只负责控制水龙头的开或关,实际流入设备的电流跟微控制器输出的电流是两股电流,需要给流入设备的电流另外准备一个电源来供给电流。最简单的驱动电路包括开关电路,它利用了一种叫作晶体管的电子器件,这种器件能控制电流。晶体管有两种类型,分别是 NPN 型晶体管和 PNP 型晶体管,因为它们类型不同,所以电流通过的路径也不同。它们都具备发射极(Emitter,简称 E)、集电极(Collector,简称 C)和基极(Base,简称 B)这 3 种端子。
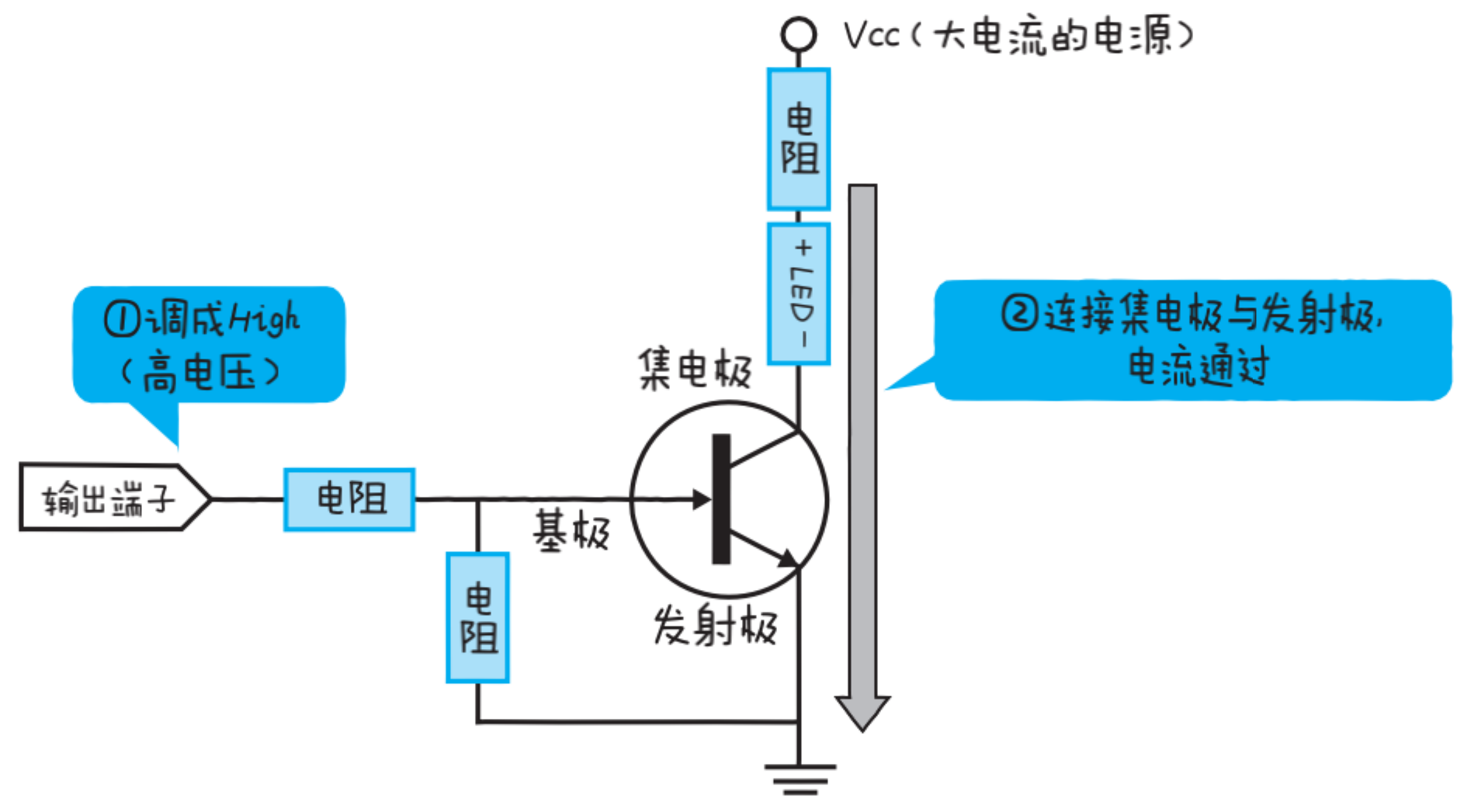
以 NPN 型为例进行说明:当微控制器连接到基极,且微控制器的输出电压低(0 V)的时候,集电极与发射极之间是没有电流流过的。反过来,把基极的输出电压调高,再让电流流过,电流就会从集电极流到发射极了。这个机制非常像开关,把电流加在基极上,就能控制集电极-发射极之间的开或关。有一点很重要:即使加在基极上的电流只有小幅度的变化,也会导致晶体管切换开关状态。把大型电源连接到集电极,就能在很大程度上放大并输出基极的电流。可以通过控制微控制器的输出来令 LED 点亮或熄灭。¶
输出-PWM¶
把数字信号转换成模拟信号:数字 / 模拟(D/A)转换
脉冲宽度调制(Pulse Width Modulation,简称 PWM)方式通过高速切换输出高 / 低电压来实现近似输出模拟信号,很多微控制器都采用了这个方式。
第 4 章 先进的感测技术¶
GPS 接收器并不会向卫星发射信息,它毕竟只是一台用来接收卫星发来的无线电波的设备。
卫星发射出的无线电波中,下面两条信息尤其重要:
1. 发射无线电波时的准确时刻
2. 卫星在宇宙空间中的位置
先进的感测设备¶
RGB-D 传感器:
RGB 是红(Red)、绿(Green)、蓝(Blue) 最后的 D 是深度(Depth) 把 RGB-D 传感器想象成测距传感器和相机的组合强化版传感器 应用: a. 立体相机 b. 点阵图判断法 c. TOF(Time of Flight)技术
自然用户界面:
NUI(Natural User Interface) 应用: a. 微软 Kinect: Xbox 360 的一种控制器 b. Leap: 高速且精密地追踪其上方半径约 50 cm范围内的人类手指发出的动作 其精确度最高在 0.01 mm
先进的感测系统¶
卫星定位系统(GNSS):
GNSS(Global Navigation Satellite System,全球导航卫星系统) a. GPS b. 俄罗斯的 GLONASS c. 欧盟的 Galileo d. 中国的北斗
准天顶卫星(RNSS):
RNSS(Radio Navigation Satellite System,卫星无线电导航系统) 大致位于正上方的卫星 只要有准天顶卫星,即使周围被大楼包围,也会有很大概率成功定位
IMES:
IMES(Indoor Messaging System,室内通信系统)
使用了 Wi-Fi 的定位技术:
原理:接收信号强度 实现:指纹定位 记录无线电波在各个地点的状态,进行比较 这个方法要事先测量,比较费工夫Beacon:
利用了接收信号的强度 被用于雪山搜救方面
第 5 章 物联网服务的系统开发¶
物联网服务开发的重点¶
设备:
设备的选择 传感器的特征 测量误差 法律制约 设备的设置(设计配置, 设置场所, 设置环境) 参数设置 感测间隔 传感器网络的设置
处理方式设计:
如何连接多种多样的设备 如何应对接收数据量的增多 分散功能(边缘计算) 提高系统结构的牢固性
网络:
提升通信效率 压缩数据 选择协议
安全性:
安全性设计 风险分析 多层防御 保护设备 预防 检测 应用 保护服务器端系统 网关设备的认证 数据流量的监测和制约 保护所采集数据的隐私 在信道上进行数据隐藏 保护所感测数据的隐私
第 6 章 物联网与数据分析¶
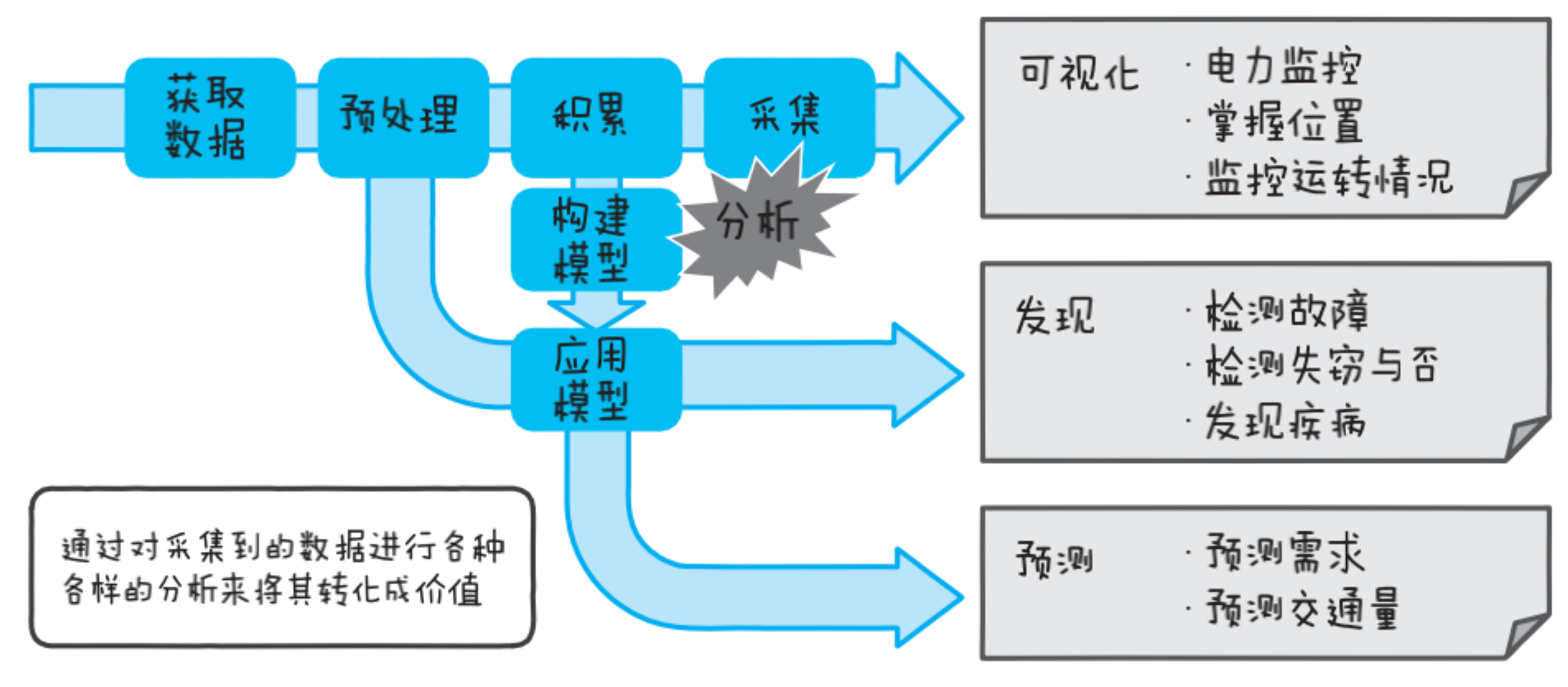
分析的种类¶
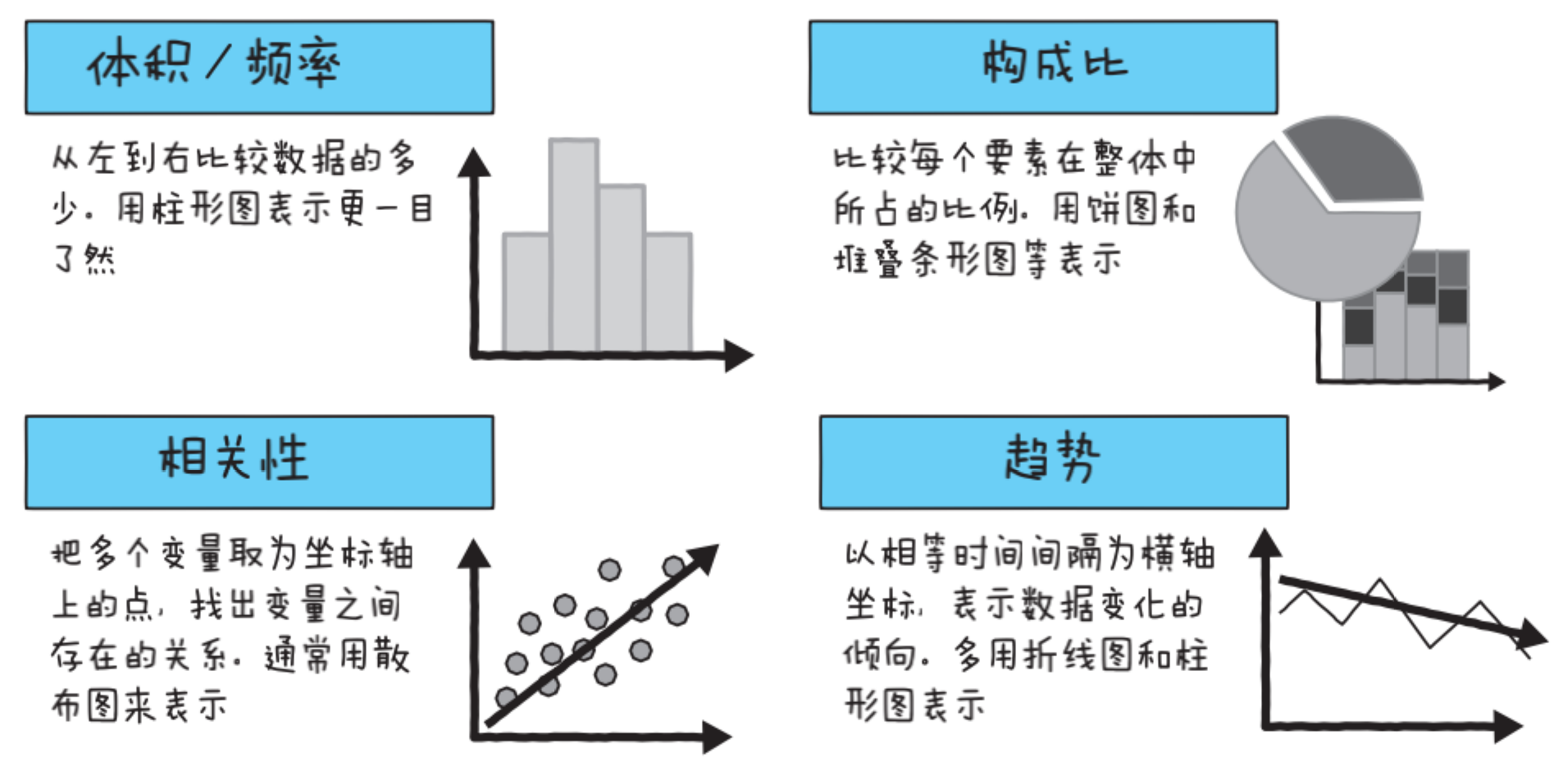
图表的种类和特征¶
第 7 章 物联网与可穿戴设备¶
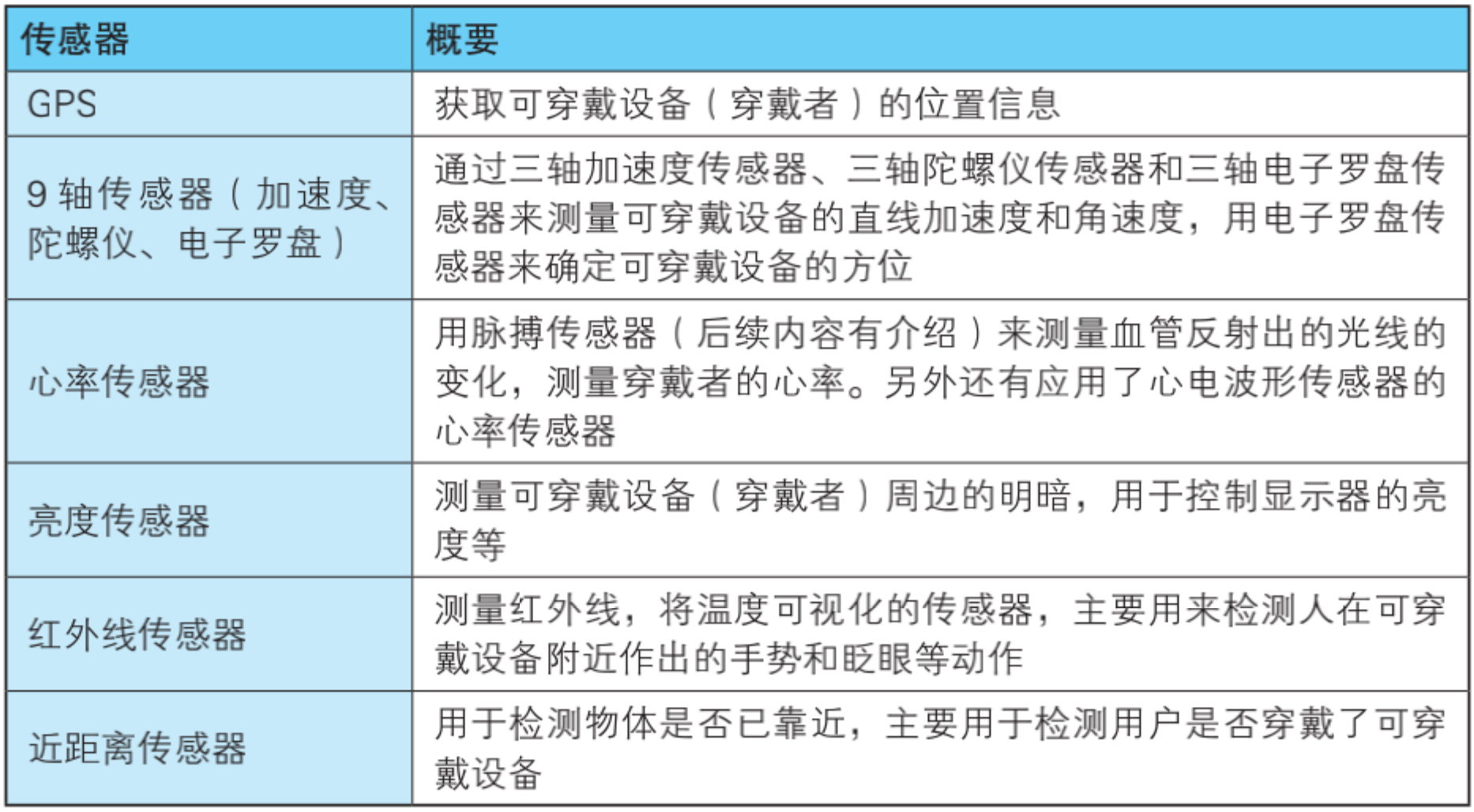
可穿戴设备上配备的典型传感器¶
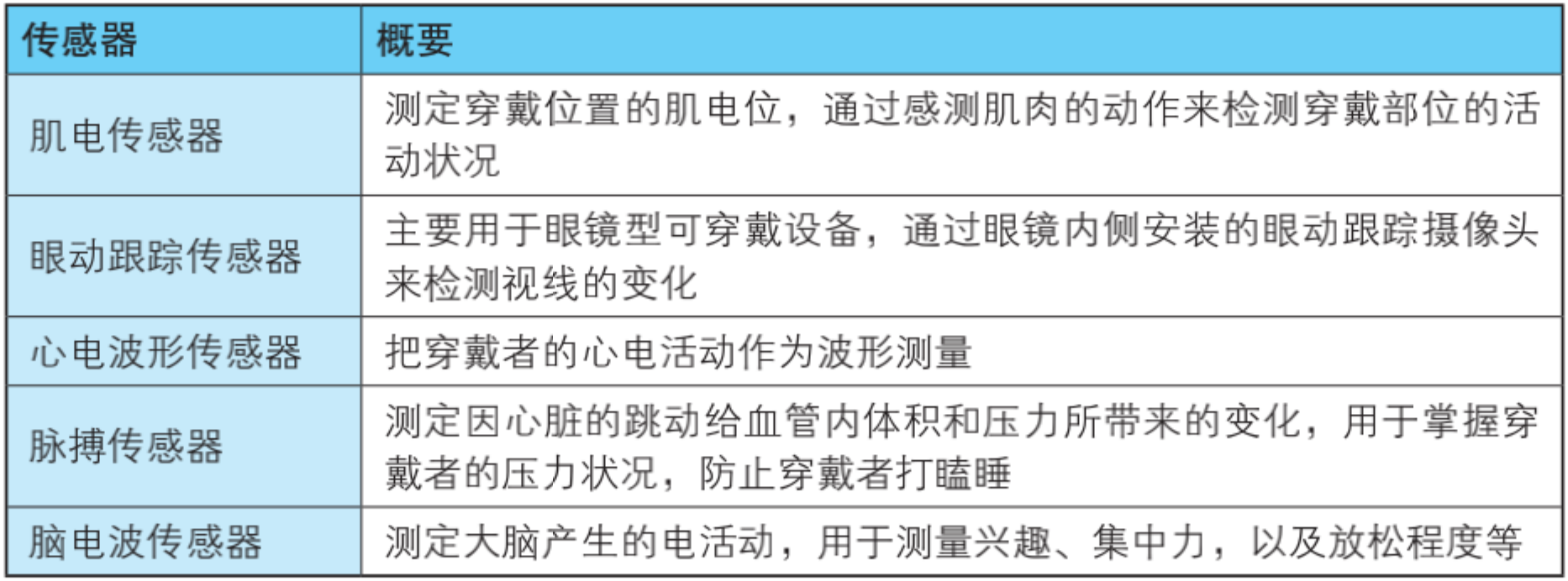
可穿戴设备独有的特色传感器¶
可穿戴设备的主流形状:
● 头戴式显示器(以下称为 HMD 型)
呈眼镜样式的“眼镜型”和完全挡在眼前的“护目镜型”
● 手表型
● 饰品型
使用可穿戴设备的 3 个典型目的:
● 显示信息
● 控制设备
语音指令
手势
触摸面板、触摸显示屏
● 感测
步数、活动量、睡眠时间
心率
心电波形
脑电波
身体特定部位的动作
挥手和举手
握拳和弯曲特定的手指
眼球运动和眨眼
第 8 章 物联网与机器人¶
ROS(Robot Operating System,机器人操作系统)
给云机器人的诞生创造了条件:
①网络的低成本化和高速化→高速无线通信、光通信
②大数据处理能力的成熟→ Hadoop、Spark、Storm、Deep Learning
③机器人技术的开放→ RT 中间件、ROS