TRIZ¶
简介¶
TRIZ(发明问题解决理论,俄语:Teoriya Resheniya Izobretatelskikh Zadach,英语:Theory of Inventive Problem Solving)是由苏联工程师根里奇·阿奇舒勒(Genrich Altshuller)于1946年创立的一套系统化创新方法论。它通过研究大量专利(尤其是高水平发明专利),总结出技术系统演化的规律与创新模式,目的是帮助人们系统、科学地解决技术难题,突破思维定势。
TRIZ的核心思想¶
问题的本质是矛盾:大多数技术难题的根源在于存在“技术矛盾”或“物理矛盾”。
技术矛盾:改进某一特性会导致另一特性恶化。
物理矛盾:同一特性在同一时间必须具备相反的状态(如“既要强又要轻”)。
发明是可系统学习和复制的:发明不是纯粹靠灵感,而是可以通过系统方法得出解决方案。
理论核心包括:基本理论和原理,具体包括
总论(基本规则、矛盾分析理论、发明的等级)
技术进化论
解决技术问题的39个通用工程参数及40个发明方法
物场分析与转换原理及76个标准解法
发明问题的解题程序(算子)
物理效应库
TRIZ的主要工具和概念¶
工具/方法 |
简要说明 |
|---|---|
40个发明原理 |
提供解决技术矛盾的40种通用创新方法。 |
矛盾矩阵(Contradiction Matrix) |
根据改进项和恶化项推荐合适的发明原理。 |
物理矛盾解决法(如分离原理) |
解决物理矛盾的方法,如时间分离、空间分离等。 |
物-场模型(Su-Field Model) |
对技术系统进行建模,寻找干预点和改进方案。 |
理想最终结果(IFR) |
描绘问题最理想的解决状态,引导发明方向。 |
技术系统进化法则 |
预测产品或系统的发展趋势(如理想性提高、动态化等)。 |
九屏幕法 |
分析问题的空间和时间背景,拓宽思路。 |
TRIZ的应用领域¶
工程设计与产品创新
制造过程优化
管理创新与商业模式创新(延伸TRIZ,如Business TRIZ)
问题解决与质量改进(结合如六西格玛、QFD等)
TRIZ的优势¶
系统性强:不是头脑风暴式的灵感碰撞,而是有规律可循的创新方法。
效率高:在解决高难度问题时,比传统试错法更快更有效。
跨领域适用:从机械、电气到软件、管理,均有实践案例。
TRIZ的学习建议¶
初学者可以从以下顺序入门:
了解40个发明原理和矛盾矩阵的用法。
学会识别技术矛盾和物理矛盾。
学习Su-Field建模和解决策略。
理解技术系统演化法则和IFR的概念。
应用于具体问题进行练习,掌握实战方法。
40个发明原理¶
TRIZ 的 40个发明原理 是 TRIZ 方法中最具代表性的创新工具之一,是解决技术矛盾的通用策略,每个原理都可跨行业、跨领域应用。
01. 分割:将对象分割为独立部分,使其更灵活、更容易处理。
02. 提取:只保留所需部分,去掉不需要或有害部分。
03. 局部质量:让系统不同部分具有不同性能,优化整体功能。
04. 反向作用:改变操作方向,如运动方向、处理顺序等。
05. 组合:将多个功能或结构组合到一个系统中。
06. 通用性:使一个物体执行多个功能,减少部件数量。
07. 嵌套结构:一个物体放进另一个物体,或多层结构。
08. 重量补偿:用其他物体来平衡或补偿重力负担。
09. 预先反作用:在问题发生前先进行反向措施。
10. 预先作用:提前执行某些操作,使后续更高效或简单。
11. 缓冲作用:加入缓冲区或中介物,降低系统间的冲突。
12. 等势:使不同部件在同一条件下工作,降低摩擦或冲突。
13. 反向使用:利用副作用或反效果实现目标。
14. 球形化:使用球体或曲面结构,提升效率与柔性。
15. 动态化:使系统或其部分具有可调节、可移动特性。
16. 部分或过度作用:不要追求“正好”,而是“过头”或“不足”,以解决问题。
17. 向另一维度转移:将对象结构从2D转到3D等更高维度空间。
18. 振动:引入周期性运动(如振动)改善性能或效果。
19. 周期性作用:利用周期性、重复性操作简化系统。
20. 持续作用:保持系统连续运行,避免启动/停止带来的问题。
21. 快速通过有害区:缩短系统在有害环境中暴露的时间。
22. “变害为利”:将负面因素转为有用元素或动力源。
23. 反馈: 使用反馈机制调整系统行为。
24. 中介物: 引入第三方元素解决两物体之间的问题。
25. 自服务: 让系统自动处理自身问题(如自清洁、自校准)。
26. 复制: 制造副本或虚拟版本进行实验或替代使用。
27. 廉价短寿命物体: 用便宜、易耗物品代替昂贵、耐用部件。
28. 机械系统替代: 用电、光、声等替代机械结构。
29. 气压或液压结构: 用流体操作系统,如气动液压控制。
30. 弹性薄膜或壳体: 使用柔性、可变形的外壳代替刚性结构。
31. 多孔材料: 使用多孔结构提高散热、过滤、轻量化等性能。
32. 色彩变化: 通过颜色或其他视觉信号反映系统状态。
33. 同质性: 使用相似或相同材料简化连接与维修。
34. 废物再利用: 将废料或副产物变成有用资源。
35. 参数变化: 改变物体的尺寸、形状、浓度、温度等参数。
36. 相变: 利用物质的相变(如熔化、蒸发)达到目的。
37. 热膨胀: 利用材料的热膨胀特性解决问题。
38. 强氧化剂: 使用更强的化学作用力加快反应或提升效率。
39. 惰性环境: 引入惰性气体或环境保护系统免受外部影响。
40. 复合材料: 使用复合材料结合多种优点。
示例讲解¶
问题1:响应能力强 vs. 资源消耗大(技术矛盾)¶
需求:提升 AI Agent 的推理能力和实时响应速度,同时又不能过度消耗 CPU/GPU、内存等资源。
TRIZ原理建议:
原理1:分割
➤ 将 Agent 拆分为多个轻量子模块(例如:Perception Agent、Planning Agent、Memory Agent),按需激活,避免资源浪费。
➤ 应用:多Agent协作、Serverless代理。
原理19:周期性作用
➤ 让 Agent 定期进入休眠、刷新或检查状态,以降低持续运行的负担。
原理35:参数变化
➤ 动态调整模型的输入精度、推理步长等,例如使用 QLoRA / 动态BatchSize 技术。
问题2:通用能力强 vs. 任务适应性弱(技术矛盾)¶
需求:希望 Agent 具备通用智能,但又能快速适配垂直领域任务(如代码代理、财务问答等);
TRIZ原理建议:
原理3:局部质量
➤ 让不同任务由专精子Agent处理,例如 RAG Agent、Tool Agent、Code Agent。
原理5:组合
➤ 结合通用大模型(如 GPT-4)与小模型(如 Code LLaMA),根据任务动态调用。
原理15:动态化
➤ 引入 Agent 动态插件(如 LangChain、AutoGen 的 Tool调用机制),使系统适应新任务无需重构架构。
问题3:长记忆保存 vs. 数据冗余或信息过时(技术矛盾)¶
需求:希望 Agent 具备长期记忆,但又避免无效记忆拖慢系统或产生幻觉。
TRIZ原理建议:
原理2:提取
➤ 从历史对话中提取核心知识点,转存为结构化知识(如Embedding + 知识图谱)。
原理10:预先作用
➤ 在每次任务之前主动进行上下文预处理和知识压缩。
原理25:自服务
➤ Agent 定期清理、压缩记忆内容,或通过 RAG 自我更新知识库。
问题4:多工具调用逻辑复杂 vs. 推理效率低(技术矛盾)¶
需求:Agent 需调用多个工具(如搜索、代码运行、数据库检索),但链条复杂易出错。
TRIZ原理建议:
原理24:中介物
➤ 引入“中控Agent”调度工具调用流程,或使用事件流调度(如MCP协议)。
原理9:预先反作用
➤ Agent 在预测可能失败时,提前进行模拟推理或测试调用,预防错误。
原理28:机械系统替代
➤ 用 LLM+Workflow(如 LangGraph)或条件图替代传统函数式调用,提高稳定性。
问题5:多Agent协作时通信频繁 vs. 带宽/延迟瓶颈¶
需求:分布式 Agent 协同任务需大量通信,但网络资源有限。
TRIZ原理建议:
原理7:嵌套结构
➤ 在每个 Agent 内部嵌入缓存子模块(如向量缓存),减少重复通信。
原理21:快速通过有害区
➤ 将关键通信数据打包压缩,快速完成通信后再解压。
原理23:反馈
➤ 引入延迟反馈机制,让 Agent 在未收到回应前做默认假设,提前推进任务。
TRIZ 矛盾矩阵¶
💡【定义】矛盾矩阵:TRIZ 矛盾矩阵是由苏联发明家 Genrich Altshuller 创建的,用于系统性地解决技术矛盾。
💡【定义】技术矛盾:在改善系统某一特性时,会导致另一个特性变差。
矛盾矩阵的目的,是帮助你回答:> “我想改进 X,但这会导致 Y 变差,我应该用哪几个发明原理来解决这个矛盾?”
🔧 结构组成¶
矛盾矩阵由以下部分组成:
参数列表: 共39个工程通用属性(如:速度、精度、复杂度、能耗、适应性等);
矩阵坐标: 横轴表示“会变差”的参数,纵轴表示“希望改善”的参数;
矩阵交叉点: 会给出 3~4 个推荐的发明原理编号,用于解决此类矛盾。
示例¶
机器人示例
问题:我要提升机器人手臂的「速度」,但会牺牲「精度」。
矛盾矩阵查询:改进参数为 速度 (9),受损参数为 精度 (27);
推荐原理:例如:原理10(预先作用)、原理28(机械系统替代)、原理19(周期性作用)等。
在 AI Agent 中的应用示例
示例1: 矛盾: 提升 Agent 响应速度(9. 速度) vs. 模型输出质量下降(27. 精度)
推荐原理:
19. 周期性作用: 使用周期性缓存刷新,提高速度同时保留部分准确性;
10. 预先作用: 预生成结果、上下文摘要,加快响应;
28. 替代机械系统: 用轻量模型替代主模型处理部分任务。
示例2:
矛盾: 引入更多工具增强功能(35. 灵活性) vs. 系统复杂性提高(36. 系统复杂度)
推荐原理:
1. 分割: 将工具系统拆分为插件系统,按需加载;
5. 组合: 多个工具组合形成复合能力;
15. 动态化: 动态选择工具路径,避免冗余。
📘 39个参数列表¶
常见列表:
编号 |
参数名称(简写) |
示例含义 |
|---|---|---|
1 |
重量 |
模型体积、部署体积 |
9 |
速度 |
推理时间、响应延迟 |
14 |
功率消耗 |
计算资源 |
27 |
精度 |
模型推理准确性 |
28 |
误差 |
任务执行失败率 |
35 |
适应性/灵活性 |
Agent适应不同任务的能力 |
36 |
系统复杂性 |
Agent系统模块依赖度 |
39 |
可制造性/实现性 |
工程可落地程度 |
AI Agent 场景中
参数编号 |
在 AI Agent 中的类比 |
|---|---|
9 |
响应速度、推理时间 |
19 |
GPU/CPU 能耗 |
24 |
记忆丢失、上下文缺失 |
27 |
推理准确率、输出精度 |
31 |
用户使用门槛、配置难度 |
34 |
Agent 通用性、是否能处理多种任务 |
35 |
Agent 的模块复杂性、代码依赖度 |
37 |
自动完成子任务的能力 |
39 |
幻觉、延迟、数据泄露等副作用 |
全部39个参数列表
编号 |
参数名称 |
中文说明 |
|---|---|---|
1 |
Weight of moving object |
移动物体的重量 |
2 |
Weight of stationary object |
固定物体的重量 |
3 |
Length of moving object |
移动物体的长度 |
4 |
Length of stationary object |
固定物体的长度 |
5 |
Area of moving object |
移动物体的面积 |
6 |
Area of stationary object |
固定物体的面积 |
7 |
Volume of moving object |
移动物体的体积 |
8 |
Volume of stationary object |
固定物体的体积 |
9 |
Speed |
速度,如处理速度、执行时间等 |
10 |
Force (Intensity) |
力量或强度,例如输出强度 |
11 |
Stress or pressure |
应力或压力 |
12 |
Shape |
形状或几何特性 |
13 |
Stability of object |
稳定性,例如结果一致性、系统不抖动 |
14 |
Strength |
强度或耐久度 |
15 |
Durability of moving object |
移动物体的耐用性 |
16 |
Durability of stationary object |
固定物体的耐用性 |
17 |
Temperature |
温度,或广义“系统热度” |
18 |
Brightness |
亮度,或视觉可见性 |
19 |
Energy consumed |
能量消耗,如计算资源、电量 |
20 |
Power |
功率,单位时间能量转化率 |
21 |
Waste of substance |
材料或信息的浪费 |
22 |
Waste of time |
时间的浪费 |
23 |
Waste of energy |
能量的浪费 |
24 |
Loss of information |
信息损失,精度丢失、记忆丢失等 |
25 |
Loss of substance |
材料损耗 |
26 |
Reliability |
可靠性 |
27 |
Measurement accuracy |
测量或判断的准确性 |
28 |
Manufacturing precision |
制造或实现精度 |
29 |
Object affected harmful factors |
对有害因素的抵抗能力 |
30 |
Object affected external environment |
外部环境影响程度 |
31 |
Ease of operation |
操作简便性(使用体验、交互复杂度) |
32 |
Ease of repair |
维修/修改的简易性 |
33 |
Ease of manufacturing |
制造或实现的简便性 |
34 |
Adaptability or versatility |
适应性或多功能性 |
35 |
Device complexity |
系统或装置的复杂性 |
36 |
Difficulty of detecting and measuring |
检测或测量的难度 |
37 |
Level of automation |
自动化程度 |
38 |
Level of productivity |
生产率或系统产出能力 |
39 |
Harmful effects generated by system |
系统本身产生的副作用 |
✅ 应用步骤总结¶
明确你的矛盾点:哪个系统参数你想提高?哪个参数会因此变差?
查表(或用工具)定位两个参数交叉点
找到推荐的发明原理编号
对照40个发明原理解释表,类比应用到你的场景中
物理矛盾解决法(如分离原理)¶
TRIZ 中除了“技术矛盾”解决方法(使用矛盾矩阵和40个发明原理),还特别强调一种更高级的矛盾形式——物理矛盾(Physical Contradictions),以及它的经典解决策略:分离原理(Separation Principles)。
💡【定义】物理矛盾:同一个系统参数在同一时间或空间中必须同时满足两个相互矛盾的需求。
示例
我们希望 Agent 既要“有记忆”又要“没有记忆”
➜ 有记忆时能持续跟踪上下文,但又可能积累幻觉或过时信息。
我们希望 Agent 在交互中“自由探索”,又要“高度受控”
➜ 探索能创造新路径,但受控才能满足规范输出。
物理矛盾的四种分离原理(Separation Principles)
分离原理 |
核心思想 |
示例(AI Agent 场景) |
|---|---|---|
1. 时间分离 |
不同时间满足不同需求 |
Agent 在夜间离线批处理记忆,白天运行实时对话 |
2. 空间分离 |
不同位置满足不同需求 |
主模型不记忆,辅助模块/缓存记忆 |
3. 条件分离 |
不同条件下满足不同需求 |
仅在调用 API 工具时启动权限管理,其余放开自由对话 |
4. 系统层次分离 |
在不同系统层级实现矛盾需求 |
上层策略模型要求稳定,下层执行模型保持灵活 |
AI Agent 中的应用示例
案例1:我们希望 Agent “响应要快”又“推理要深”
这是一个典型的物理矛盾,速度和深度矛盾。
▶ 解决策略:
时间分离:
快速响应时先用 shallow model 简答,再后台调用大模型进行更深层判断(如“分两阶段交互”)
条件分离:
若任务紧急则快速输出,若非紧急则慢推理(可加 urgency 参数判断)
案例2:我们希望 Agent “总能记住一切”,又“不要被旧信息干扰”
这也是一个经典矛盾:长期记忆 vs. 信息新鲜性。
▶ 解决策略:
空间分离:
将 Agent 的长期记忆和短期上下文分离,长期记忆存储于向量数据库中,仅在需要时检索。
条件分离:
若用户话题切换明显,则重置记忆;若属于同一主题,则继续使用历史上下文。
案例3:Agent 需要“自主学习”又“可控可信”
这个物理矛盾体现在:自学习需要放开限制,但可信性又要求控制。
▶ 解决策略:
系统层次分离:
高层监督模块定义规则,底层子Agent可以自由学习但必须向上报告结果。
条件分离:
在“沙盒”环境中放开探索,部署时切换为受限推理。
✍️ 总结:如何使用分离原理解决物理矛盾?
识别物理矛盾本质: 同一参数要“既A又非A”?
选择合适的分离方式: ➤ 时间、空间、条件、系统层次?
设计系统结构或行为: 通过模块分离、策略切换、缓存、条件判断等方式落地。
物-场模型(Su-Field Model)¶
简介¶
Su-Field(Substance-Field)模型 是 TRIZ 中用于分析和解决功能性问题的工具,它帮助我们:
描述系统中**物体(Substance)与能量/作用场(Field)**之间的相互作用;
识别系统结构中的“功能不完善”或“有害功能”;
通过一定的**标准解(Standard Solutions)**加以改进。
基本结构
S1: 被处理的物体(目标)
S2: 执行作用的物体(工具)
F : 两者之间的能量或场(作用力/信号/信息流等)
例如:
在机械中,S1 是螺丝,S2 是螺丝刀,F 是施加的力。
在 AI 系统中,S1 是用户输入,S2 是大模型,F 是输入文本流、注意力机制等。
功能模型分类
完整 Su-Field: S1、S2 和 F 三者都存在,功能有效
不完整模型: 缺少 S1/S2/F 中的某一项,导致功能无效
有害 Su-Field: 存在作用,但结果对系统有害(如幻觉、失控)
AI Agent 示例¶
示例1:LLM 接收用户输入并进行回答
S1: 用户问题(input)
S2: 大语言模型
F: Token 流 / 注意力机制 / 上下文融合
✅ 若三者完整并良性协作,系统就“功能正常”
❌ 如果注意力机制失效(F 质量差),可能导致幻觉或跑题 —— 不完整模型。
示例2:多模态 Agent 处理图像并产生答案
S1: 图像内容(视觉目标)
S2: Agent 模型(视觉-语言结合模型)
F: 特征映射/图文对齐机制(如 cross-attention)
如果 F 弱或不适配,模型就无法理解图像内容(功能低效)
🔧 AI Agent 场景中常见的“物-场问题”示例
问题 |
Su-Field 描述 |
标准解 |
|---|---|---|
幻觉过多 |
F(上下文机制)不精准 |
优化 F,添加过滤模块 |
工具调用不可靠 |
S2(工具模块)弱 |
加强工具接口或冗余机制 |
推理质量低 |
S1(输入)未结构化 |
引入预处理模块改造 S1 |
多模态协同失败 |
F(跨模态融合机制)不适配 |
增加 cross-modal bridge |
如何使用物-场模型改进系统?
步骤一:建立模型:分析系统中主要的“目标物体”、“作用物体”和“连接场”。
步骤二:判断模型类型
是完整的 Su-Field 吗?
有没有产生有害功能(比如过度冗余、幻觉、不确定性)?
步骤三:匹配 TRIZ 标准解(Standard Solutions)
TRIZ 提供了 76 个标准解方案来修复或优化物-场模型,以下是几个常用的类型:
类别
标准解决策略
示例(AI Agent 场景)
1类:引入缺失元素
若 F 缺失 ➜ 引入合适的作用机制
加 attention 或 memory 缓冲机制
2类:改善作用场
替换或调整作用机制
从 RNN 替换为 Transformer
3类:防止有害场作用
引入屏蔽、反馈机制
使用 RLHF 限制有害输出
4类:构造双重场机制
加冗余路径提高稳健性
Agent 先 summary 再问答
5类:转换物质结构
调整模块结构
将多工具 Agent 改为统一接口调度
76 个标准解总览¶
▶ 第 1 类:建立或完善 Su-Field 系统(1-24)¶
当系统不完整,需构建或增强三要素(S1、S2、F)。
编号 |
名称 |
简要说明 |
|---|---|---|
1 |
引入新的作用场 |
添加新的场(例如力、热、电磁等) |
2 |
改变已有场类型 |
例如用电场代替磁场 |
3 |
增强已有场强度 |
增强原场(例如加强注意力机制) |
4 |
提高场的控制性 |
使用反馈机制或调节场方向 |
5 |
引入中介物质 |
添加第三物质改善作用 |
6 |
改善物质结构 |
优化S1或S2(如更换模型结构) |
7~24 |
… |
各种场构建和调节方式 |
▶ 第 2 类:提高 Su-Field 功能效率(25-39)¶
已有作用有效但性能不足,需优化作用方式。
编号 |
名称 |
简要说明 |
|---|---|---|
25 |
场叠加 |
使用多种场叠加(如电+磁) |
26 |
自适应控制场 |
根据反馈自动调整作用 |
27 |
场转换器 |
使用转换机制,如 embedding 层 |
28 |
多模式交替 |
多种场按条件交替使用 |
29~39 |
… |
多种组合调控优化方式 |
▶ 第 3 类:消除有害功能(40-47)¶
系统中存在副作用、错误、危险或幻觉,需要抑制。
编号 |
名称 |
简要说明 |
|---|---|---|
40 |
引入相反场 |
用反向作用抵消错误功能 |
41 |
引入中和物 |
引入“抑制”模块过滤错误输出 |
42 |
时序隔离 |
将错误场作用限制在不同时间 |
43 |
屏蔽有害场 |
加屏障或“验证”机制 |
44 |
消除源头 |
移除引发幻觉的 S2 结构 |
45~47 |
… |
消除错误作用的策略集合 |
▶ 第 4 类:构建双重或多功能系统(48-59)¶
当一个系统必须具备两种甚至矛盾的功能。
编号 |
名称 |
简要说明 |
|---|---|---|
48 |
双场系统 |
两种场并用(如 GPT+Rule-Checker) |
49 |
双S系统 |
两个S2轮流工作(主模型+辅助模型) |
50 |
双功能工具 |
同一组件可执行两种功能 |
51~59 |
… |
多功能系统设计策略 |
▶ 第 5 类:测量与检测(60-76)¶
用于系统的检测、诊断与反馈控制。
编号 |
名称 |
简要说明 |
|---|---|---|
60 |
引入检测场 |
添加感知机制(如监控模块) |
61 |
添加辅助测量物 |
加入“测试Agent”/探针 |
62 |
内部反馈通路 |
模型内部信息回传优化 |
63 |
多点检测 |
多位置检测/验证 |
64~76 |
… |
系统性检测与反馈机制构建方案 |
📌 应用于 AI Agent 的示例对照¶
问题 |
标准解编号 |
应用建议 |
|---|---|---|
幻觉控制 |
40、41、43 |
加 RLHF 或 rule filter,构建屏蔽/中和机制 |
工具调用失败 |
1、5、49 |
引入新作用机制或冗余工具路径 |
推理低效 |
3、26、27 |
增强场(注意力)、加自适应控制 |
多模态失败 |
25、48、50 |
多场叠加、双场模型组合使用 |
回答不稳 |
42、45 |
时间隔离旧信息、优化回传机制 |
理想最终结果(IFR)¶
在 TRIZ 理论中,理想最终结果(Ideal Final Result,简称 IFR) 是最核心的概念之一。
它帮助发明者摆脱传统思维束缚,以更具突破性的方式寻找最优解。
简介¶
【定义】IFR(理想最终结果): IFR 是指在不引入复杂性或额外成本的前提下,系统自动完成任务、解决问题,且没有副作用。
一句话总结:“功能实现了,代价为零,副作用为零,系统本身消失。”
IFR 的目标思维模式:TRIZ 鼓励你不要一开始就问 “我能怎么改进?”而是先问:“如果一切都完美了,会是什么样?”然后再反推:我该怎么向那个完美的目标靠近?
IFR 的四个关键标准¶
标准 |
内容 |
举例(AI Agent 场景) |
|---|---|---|
有效功能 |
问题已被完美解决 |
Agent 能正确理解、推理、行动 |
无有害功能 |
无副作用或额外损耗 |
无幻觉、无冗余调用、无延迟 |
无系统成本 |
不需要新资源或部件 |
无需新硬件或额外标注数据 |
无操作成本 |
用户无需主动介入 |
自动调度、自动调参、自动优化 |
从 IFR 出发进行问题建模的常用问题
系统中最核心的功能是什么?
哪些代价或副作用是可以“设想为不存在”的?
有没有可能让系统外部的元素承担这项任务?
有没有可能让系统自动执行,不需要输入?
🧠 AI Agent 场景中的 IFR 示例¶
问题:用户说一句话,Agent 能自动完成一系列复杂任务,但目前 Agent 调用多个工具接口失败率高,响应慢。
IFR 设想: 用户说一句话 → Agent 准确理解意图 → 精准选择最优工具 → 任务快速完成 → 无延迟、无误差、无需调试。
推导路径:
减少人工干预 ➜ 加 prompt 自优化机制
降低系统复杂度 ➜ 统一多工具接口格式
提升准确率 ➜ 增强 context-aware 模块 + few-shot memory
自动恢复错误 ➜ 引入工具调用容错 + 备选路径回滚
✨ IFR 的一种极端形态: “功能被实现了,但系统本身不存在。”
无电池设备靠环境能量工作
AI 自动学习而无需标注数据
Agent 自适应 prompt 而非手动调整
与物-场模型和矛盾解决的关系¶
IFR 是你要抵达的“终点”
物-场模型 描述系统当前状态与问题点
40 个发明原理 / 矛盾矩阵 提供“中间路径”
76 个标准解 提供更具体的技术解决工具
📌 总结:为什么要使用 IFR 思维?¶
优点 |
说明 |
|---|---|
🚀 跳出局限 |
不受当前系统约束,面向“终极目标” |
🧠 激发创新 |
用于找到非常规突破口 |
🧭 导向清晰 |
为后续 TRIZ 工具提供方向参考 |
💰 降低成本 |
帮助识别哪些部件/成本是可以消除的 |
技术系统进化法则¶
技术系统进化的核心理念: 技术系统并非随机演进,而是沿着一定方向、阶段、有规律地演化。
TRIZ 的 九大技术进化法则¶
法则类别 |
说明 |
示例(AI Agent 应用) |
|---|---|---|
1️⃣ 技术系统完整性 |
一个系统必须具备核心结构和功能要素(驱动元件、传递元件、工作元件) |
Agent 必须具备感知、理解、执行三个模块 |
2️⃣ 能量导通性 |
有效运行的系统必须具备能量流、信号流通路 |
Prompt、状态、响应信息必须正确流通 |
3️⃣ 系统理想度提高 |
系统趋向于实现最大功能、最小成本和最少副作用(即IFR) |
多工具协作时,降低延迟、避免冲突、提升准确性 |
4️⃣ 不均衡发展 |
系统各部分发展速度不同,落后部分会成为瓶颈 |
多模态模型里语音识别强但指令执行弱,需补足弱点 |
5️⃣ 升级化/协调化 |
各子系统趋向于自动协调、功能融合 |
Agent 融合多语言、多模态、多工具调用能力 |
6️⃣ 向超系统发展 |
系统发展到一定阶段后会被纳入更大的系统中 |
Agent 融合入企业工作流、成为企业流程一部分 |
7️⃣ 微型化 / 分子化 |
系统元素趋向微型化、模块化、自主化 |
LLM 模块转向 LoRA、插件化、Agent 粒度更小 |
8️⃣ 动态化 |
元素变得可调、可伸缩、可切换 |
Agent 可根据任务调整流程、角色和能力 |
9️⃣ 多级进化 |
系统从单层结构向多层嵌套、复杂结构演化 |
多层Agent结构,如 Planner → Executor → Sub-Agent |
进化阶段模型(S曲线)¶
初始阶段:功能实现困难,但潜力大
增长阶段:技术快速演进、竞争加剧
成熟阶段:优化空间变小,接近极限
饱和阶段:创新受限,系统需突破或转型
🧠 用于指导 AI Agent 技术设计的实践例子¶
进化法则 |
应用方向 |
设计建议 |
|---|---|---|
系统完整性 |
Agent 组件必须齐全 |
保证有 perception、memory、action 等关键模块 |
不均衡发展 |
找瓶颈部件 |
工具调用慢 → 加强 ToolRouter 和异步队列 |
升级化 |
模块间融合 |
将 Prompt、Tool Use、Memory 融合成统一接口 |
超系统发展 |
集成到更大平台 |
Agent 接入 Slack / 企业流程平台 |
微型化 |
轻量 Agent 模块化 |
每个子任务独立 LoRA 微 Agent 调用 |
动态化 |
角色动态转化 |
一个 Agent 可根据上下文变化行为(如 CoT vs Tool) |
✅ 总结¶
项目 |
内容 |
|---|---|
核心价值 |
把握技术进化方向,主动设计未来 |
避免问题 |
不再盲目优化细节,避免“局部最优” |
推荐搭配 |
IFR、矛盾矩阵、Su-Field、40原理 |
应用方向 |
产品路线规划、专利设计、系统升级路径设计 |
九屏幕法¶
九屏幕法(Nine-Windows Method) 是 TRIZ 中一个非常实用的分析工具,用于帮助我们从时间与空间两个维度全面理解和改进系统,突破“只看当前、只看局部”的限制。
【定义】九屏幕法:一种三行三列的矩阵视图,它将系统放在时间(过去-现在-未来)和空间(子系统-系统-超系统)两个维度中进行分析。
九屏幕矩阵结构
┌────────────┬────────────┬────────────┐
│ 过去子系统 │ 过去系统 │ 过去超系统 │
├────────────┼────────────┼────────────┤
│ 当前子系统 │ 当前系统 │ 当前超系统 │
├────────────┼────────────┼────────────┤
│ 未来子系统 │ 未来系统 │ 未来超系统 │
└────────────┴────────────┴────────────┘
示例¶
过去 |
现在 |
未来 |
|
|---|---|---|---|
子系统 |
静态 Prompt + API 调用 |
LLM + Memory + Tool Router |
自进化 Memory、插件化子 Agent |
系统 |
单一任务 Agent |
支持任务规划与执行的通用 Agent |
自动规划 + 自适应 Agent 群体 |
超系统 |
本地测试或单一平台部署 |
集成进工作流、平台化调度框架 |
Agent 网络嵌入企业或社会协作体系 |
问题例子:Agent 对复杂任务(如跨表格处理)响应准确率低。
使用九屏幕法分析:
过去 |
现在 |
未来 |
|
|---|---|---|---|
子系统(模块组件) |
仅使用模板 Prompt,难以泛化 |
Tool 使用顺序混乱、无上下文感知 |
加入 context-aware 模块,使用 memory stream |
系统(整体架构) |
固定流程不可调 |
多轮对话中状态丢失 |
多 Agent 分工合作、自动协商角色 |
超系统(环境) |
离线或受限环境运行 |
工具异构、调用接口多变 |
融合入企业数据流、形成智能运营层 |
👉 结论:应当从子系统协同调度和超系统集成角度进行系统演化设计。
使用价值¶
优势 |
说明 |
|---|---|
全局视角 |
避免只关注当前系统本身 |
时序推演 |
帮助发现进化路径与变革点 |
创新触发 |
利用空间/时间延展找出隐藏机会 |
需求分析 |
识别每层系统在不同时间的瓶颈 |
🧩 总结¶
项目 |
内容 |
|---|---|
本质 |
从时间与空间两个维度审视系统发展与问题 |
常用于 |
技术诊断、系统升级、产品演进路径设计 |
格外适合 |
AI系统设计、架构升级、专利发明构思 |
其他¶
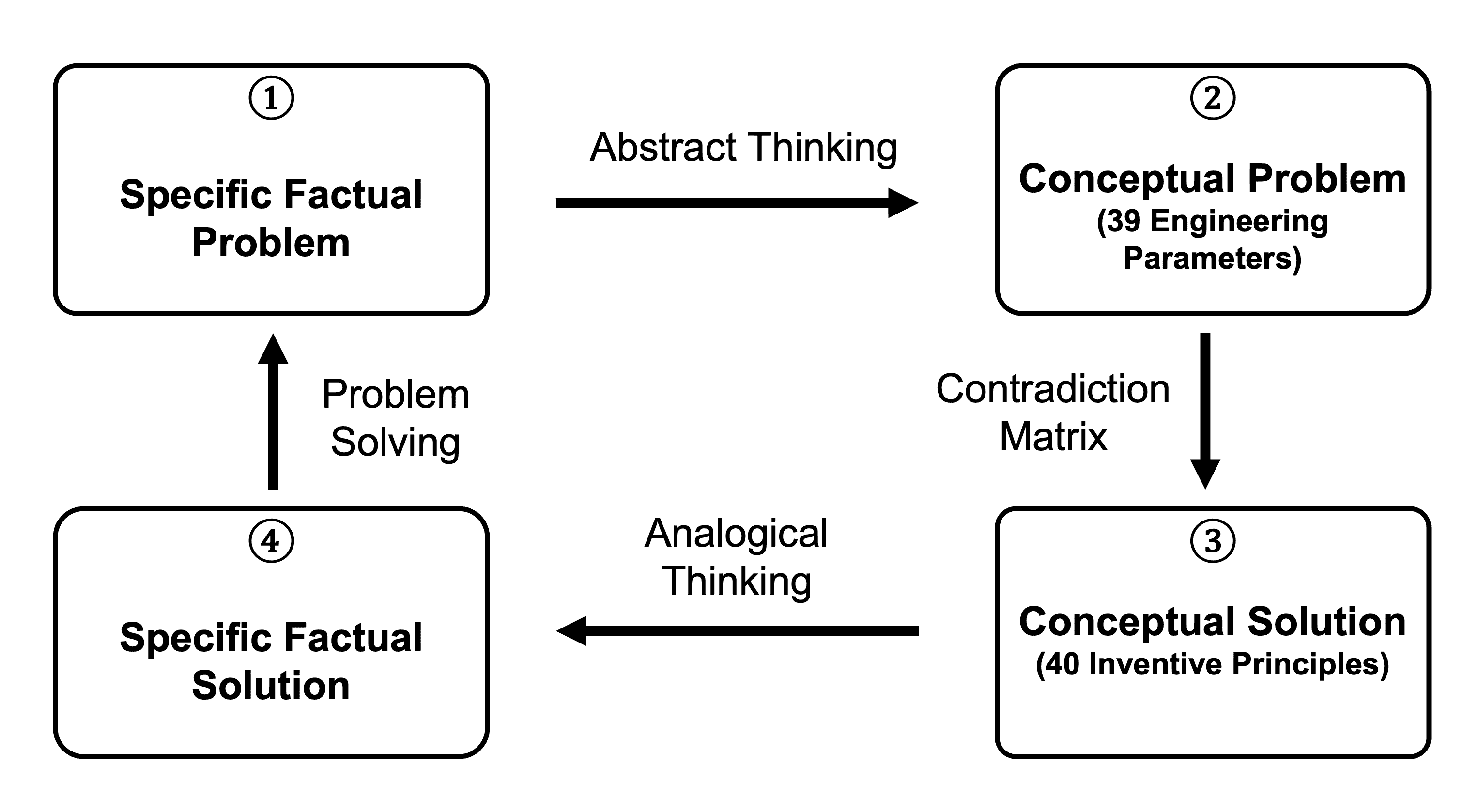
Four steps for problem solving using TRIZ
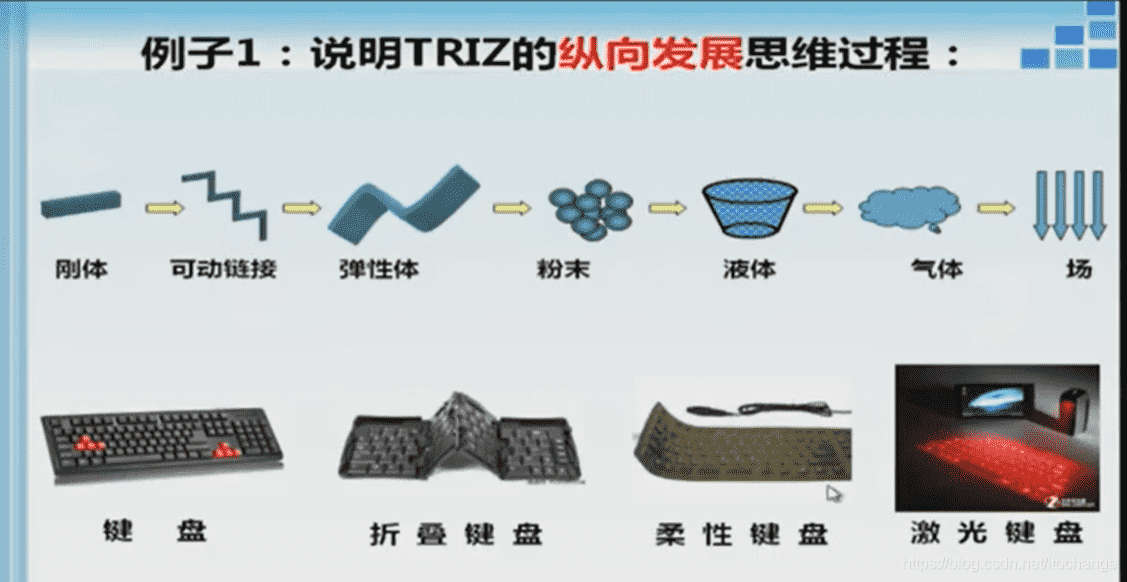
TRIZ理论的纵向发展流程