常用¶
重要
学习数据结构和算法,要学习它的由来、特性、适用的场景以及它能解决的问题。
定义:
从广义上讲,数据结构就是指一组数据的存储结构。算法就是操作数据的一组方法。
从狭义上讲,是指某些著名的数据结构和算法,比如队列、栈、堆、二分查找、动态规划等。
数据结构和算法是相辅相成的。
数据结构是为算法服务的,算法要作用在特定的数据结构之上。
10 个数据结构:
数组、链表、栈、队列、散列表、二叉树、堆、跳表、图、Trie 树
10 个算法:
递归、排序、二分查找、搜索、哈希算法、贪心算法、分治算法、回溯算法、动态规划、字符串匹配算法
时间复杂度¶
备注
大 O 时间复杂度表示法。大 O 时间复杂度实际上并不具体表示代码真正的执行时间,而是表示代码执行时间随数据规模增长的变化趋势,所以,也叫作渐进时间复杂度(asymptotic time complexity),简称时间复杂度。
三个比较实用的方法:
1. 只关注循环执行次数最多的一段代码
2. 加法法则:总复杂度等于量级最大的那段代码的复杂度
3. 乘法法则:嵌套代码的复杂度等于嵌套内外代码复杂度的乘积
时间复杂度分两类:
多项式量级
1. O(1)
2. O(logn)、O(nlogn)
3. O(m+n)、O(m*n)
非多项式量级
O (2^n) 和 O (n!)
非多项式量级的算法问题叫作 NP(Non-Deterministic Polynomial,非确定多项式)问题
非多项式时间复杂度的算法其实是非常低效的算法
空间复杂度¶
备注
空间复杂度全称就是渐进空间复杂度(asymptotic space complexity),表示算法的存储空间与数据规模之间的增长关系。
常见的空间复杂度就是:
O(1)、O(n)、O(n^2)
1. 最好情况时间复杂度(best case time complexity)
2. 最坏情况时间复杂度(worst case time complexity)
3. 平均情况时间复杂度(average case time complexity)
加权平均值,也叫作期望值
4. 均摊时间复杂度(amortized time complexity)
数组-Array¶
数组(Array)是一种线性表数据结构。它用一组连续的内存空间,来存储一组具有相同类型的数据:
两个特点:
1. 线性表
2. 连续的内存空间和相同类型的数据
优点:
一个堪称“杀手锏”的特性:“随机访问”
缺点:
数组的很多操作变得非常低效,比如:
要想在数组中删除、插入一个数据,为了保证连续性,就需要做大量的数据搬移工作。
数据结构:
1. 线性表(Linear List)
顾名思义,线性表就是数据排成像一条线一样的结构。
每个线性表上的数据最多只有前和后两个方向。
其实除了数组,链表、队列、栈等也是线性表结构。
2. 非线性表
比如二叉树、堆、图等。
之所以叫非线性,是因为,在非线性表中,数据之间并不是简单的前后关系。
插入数据时间复杂度:
1. 在数组的末尾插入元素,那就不需要移动数据了,这时的时间复杂度为 O(1)
2. 在数组的开头插入元素,那所有的数据都需要依次往后移动一位,所以最坏时间复杂度是 O(n)
3. 如果在每个位置插入元素的概率是一样的,平均情况时间复杂度为 (1+2+...n)/n=O(n)
删除操作时间复杂度:
1. 删除数组末尾的数据,则最好情况时间复杂度为 O(1)
2. 删除开头的数据,则最坏情况时间复杂度为 O(n)
3. 平均情况时间复杂度也为 O(n)
备注
小技巧:JVM 标记清除垃圾回收算法的核心思想是『每次的删除操作并不是真正地搬移数据,只是记录数据已经被删除。当数组没有更多空间存储数据时,我们再触发执行一次真正的删除操作,这样就大大减少了删除操作导致的数据搬移。』
链表¶
缓存淘汰策略来决定。常见的策略有三种:
1. 先进先出策略 FIFO(First In,First Out)
2. 最少使用策略 LFU(Least Frequently Used)
3. 最近最少使用策略 LRU(Least Recently Used)
三种最常见的链表结构:
1. 单链表
2. 双向链表
3. 循环链表
循环链表是一种特殊的单链表:
它跟单链表唯一的区别就在尾结点。
单链表的尾结点指针指向空地址,表示这就是最后的结点了。
而循环链表的尾结点指针是指向链表的头结点。
例: 约瑟夫问题
双向链表:
单向链表只有一个方向,结点只有一个后继指针 next 指向后面的结点。
而双向链表,顾名思义,它支持两个方向,
每个结点不止有一个后继指针 next 指向后面的结点,
还有一个前驱指针 prev 指向前面的结点。
存储同样多的数据,双向链表要比单链表占用更多的内存空间
实战:5个常见的链表操作:
1. 单链表反转
2. 链表中环的检测
3. 两个有序的链表合并
4. 删除链表倒数第 n 个结点
5. 求链表的中间结点
练习题LeetCode对应编号:206,141,21,19,876
链表与数组¶
链表适合插入、删除,时间复杂度 O(1)
数组支持随机访问,根据下标随机访问的时间复杂度为 O(1)
排好序的数组,用二分查找,时间复杂度也是 O(logn)
栈¶
用数组实现的栈,我们叫作顺序栈,用链表实现的栈,我们叫作链式栈。 支持动态扩容的顺序栈 对于入栈操作来说,最好情况时间复杂度是 O(1),最坏情况时间复杂度是 O(n)。将 K 个数据搬移均摊到 K 次入栈操作,入栈操作的均摊时间复杂度就为 O(1)。
1.栈在函数调用中的应用 操作系统给每个线程分配了一块独立的内存空间,这块内存被组织成“栈”这种结构,用来存储函数调用时的临时变量。每进入一个函数,就会将其中的临时变量作为栈帧入栈,当被调用函数执行完成,返回之后,将这个函数对应的栈帧出栈。
栈在表达式求值中的应用 编译器就是通过两个栈来实现的。其中一个保存操作数的栈,另一个是保存运算符的栈。我们从左向右遍历表达式,当遇到数字,我们就直接压入操作数栈;当遇到运算符,就与运算符栈的栈顶元素进行比较。 如果比运算符栈顶元素的优先级高,就将当前运算符压入栈;如果比运算符栈顶元素的优先级低或者相同,从运算符栈中取栈顶运算符,从操作数栈的栈顶取 2 个操作数,然后进行计算,再把计算完的结果压入操作数栈,继续比较。
后缀(逆波兰)表示法
栈在括号匹配中的应用 {[] ()[{}]}或[{()}([])]等都为合法格式,而{[}()]或[({)]为不合法的格式 当扫描到左括号时,则将其压入栈中;当扫描到右括号时,从栈顶取出一个左括号。如果能够匹配,比如“(”跟“)”匹配,“[”跟“]”匹配,“{”跟“}”匹配,则继续扫描剩下的字符串。如果扫描的过程中,遇到不能配对的右括号,或者栈中没有数据,则说明为非法格式。当所有的括号都扫描完成之后,如果栈为空,则说明字符串为合法格式;否则,说明有未匹配的左括号,为非法格式。
用栈实现浏览器的前进、后退功能
我们使用两个栈,X 和 Y,我们把首次浏览的页面依次压入栈 X,当点击后退按钮时,再依次从栈 X 中出栈,并将出栈的数据依次放入栈 Y。当我们点击前进按钮时,我们依次从栈 Y 中取出数据,放入栈 X 中。当栈 X 中没有数据时,那就说明没有页面可以继续后退浏览了。当栈 Y 中没有数据,那就说明没有页面可以点击前进按钮浏览了。
内存中的堆栈和数据结构堆栈 不是一个概念,可以说内存中的堆栈是真实存在的物理区,数据结构中的堆栈是抽象的数据存储结构。 内存空间在逻辑上分为三部分:代码区、静态数据区和动态数据区,动态数据区又分为栈区和堆区。 代码区:存储方法体的二进制代码。高级调度(作业调度)、中级调度(内存调度)、低级调度(进程调度)控制代码区执行代码的切换。 静态数据区:存储全局变量、静态变量、常量,常量包括final修饰的常量和String常量。系统自动分配和回收。 栈区:存储运行方法的形参、局部变量、返回值。由系统自动分配和回收。 堆区:new一个对象的引用或地址存储在栈区,指向该对象存储在堆区中的真实数据。
leetcode上关于栈的题目大家可以先做20,155,232,844,224,682,496.
队列¶
队列跟栈一样,也是一种操作受限的线性表数据结构。 最基本的操作也是两个:入队 enqueue (),放一个数据到队列尾部;出队 dequeue () 额外特性的队列,比如:
1. 循环队列:
最关键的是,确定好队空和队满的判定条件
队列为空的判断条件仍然是 head == tail
当队满时,(tail+1)%n=head
2. 阻塞队列:
队列为空时: 从队头取数据会被阻塞。因为此时还没有数据可取,直到队列中有了数据才能返回
队列已满时: 那么插入数据的操作就会被阻塞,直到队列中有空闲位置后再插入数据,然后再返回
可以使用阻塞队列,轻松实现一个 “生产者 - 消费者模型”
3. 并发队列
在多线程情况下,会有多个线程同时操作队列,这个时候就会存在线程安全问题
线程安全的队列我们叫作并发队列。
最简单直接的实现方式是直接在 enqueue ()、dequeue () 方法上加锁
基于数组的循环队列,利用 CAS 原子操作,可以实现非常高效的并发队列
这也是循环队列比链式队列应用更加广泛的原因
它们在很多偏底层系统、框架、中间件的开发中,起着关键性的作用。比如高性能队列 Disruptor、Linux 环形缓存,都用到了循环并发队列;Java concurrent 并发包利用 ArrayBlockingQueue 来实现公平锁等。
跟栈一样,队列可以用数组来实现,也可以用链表来实现。用数组实现的栈叫作顺序栈,用链表实现的栈叫作链式栈。同样,用数组实现的队列叫作顺序队列,用链表实现的队列叫作链式队列。
线程池没有空闲线程时,新的任务请求线程资源时,线程池该如何处理:
第一种是非阻塞的处理方式,直接拒绝任务请求;
另一种是阻塞的处理方式,将请求排队,等到有空闲线程时,取出排队的请求继续处理
基于链表和基于数组这两种实现方式对于排队请求又有什么区别:
1. 基于链表的实现方式,可以实现一个支持无限排队的无界队列(unbounded queue)
但是可能会导致过多的请求排队等待,请求处理的响应时间过长。
所以,针对响应时间比较敏感的系统,基于链表实现的无限排队的线程池是不合适的
2. 基于数组实现的有界队列(bounded queue),队列的大小有限
所以线程池中排队的请求超过队列大小时,接下来的请求就会被拒绝,
这种方式对响应时间敏感的系统来说,就相对更加合理。
不过,设置一个合理的队列大小,也是非常有讲究的。
队列太大导致等待的请求太多,队列太小会导致无法充分利用系统资源、发挥最大性能。
备注
队列可以应用在任何有限资源池中,用于排队请求,比如数据库连接池等。实际上,对于大部分资源有限的场景,当没有空闲资源时,基本上都可以通过 “队列” 这种数据结构来实现请求排队。
递归¶
递归需要满足的三个条件:
1. 一个问题的解可以分解为几个子问题的解
2. 这个问题与分解之后的子问题,除了数据规模不同,求解思路完全一样
3. 存在递归终止条件
写递归代码最关键的是:
1. 写出递推公式
2. 找到终止条件
写递归代码的关键就是找到如何将大问题分解为小问题的规律,并且基于此写出递推公式,
然后再推敲终止条件,最后将递推公式和终止条件翻译成代码。
排序算法¶
最经典的、最常用的:
O(n^2), 基于比较: 冒泡排序、插入排序、选择排序
O(nlogn), 基于比较: 归并排序、快速排序
O(n), 不基于比较: 计数排序、基数排序、桶排序
不常用的:
猴子排序、睡眠排序、面条排序
希尔排序
一个重要的度量指标,稳定性:
这个概念是说,如果待排序的序列中存在值相等的元素,经过排序之后,相等元素之间原有的先后顺序不变
如果两个相同的数前后顺序没有改变,那我们就把这种排序算法叫作『稳定的排序算法』
如果前后顺序发生变化,那对应的排序算法就叫作『不稳定的排序算法』
有这个指标的原因是:
在真正软件开发中,我们要排序的往往不是单纯的整数,而是一组对象,
我们需要按照对象的某个 key 来排序
如:
电商交易系统中的“订单”排序。订单有两个属性,一个是下单时间,另一个是订单金额。
希望:
1. 按照金额从小到大对订单数据排序
2. 对于金额相同的订单,我们希望按照下单时间从早到晚有序
操作:
我们先按照下单时间给订单排序
排序完成之后,我们用稳定排序算法,按照订单金额重新排序
冒泡排序-Bubble Sort
1. 原地排序算法
只需要常量级的临时空间,空间复杂度为 O(1)
2. 稳定的排序算法
3. 时间复杂度:
最好: O(n)
最坏: O(n^2)
平均: O(n^2)
有序度是数组中具有有序关系的元素对的个数
有序元素对:a[i] <= a[j], 如果i < j
例: 2, 4, 3, 1, 5, 6
有序度为11
(2, 4) (2, 3) (2, 5) (2, 6)
(4, 5) (4, 6) (3, 5) (3, 6)
(1, 5) (1, 6) (5, 6)
例: 6, 5, 4, 3, 2, 1
有序度为0
逆序度的定义正好跟有序度相反
逆序元素对:a[i] > a[j], 如果i < j
例: 2, 4, 3, 1, 5, 6
逆序度为4
(2, 1) (4, 3) (4, 1) (3, 1)
逆序度 = 满有序度 - 有序度
冒泡次数 冒泡结果 有序度
初使状态 2 4 3 1 5 6 11
第1次冒泡 2 3 1 4 5 6 13
第2次冒泡 2 1 3 4 5 6 14
第3次冒泡 1 2 3 4 5 6 15(满有序度)
冒泡排序包含两个操作原子,比较和交换。
每交换一次,有序度就加 1。
不管算法怎么改进,交换次数总是确定的,即为逆序度,也就是``n*(n-1)/2–初始有序度``
最坏情况下,初始状态的有序度是 0,所以要进行 n*(n-1)/2 次交换
最好情况下,初始状态的有序度是 n*(n-1)/2,就不需要进行交换
插入排序-Insertion Sort¶
1. 原地排序算法
2. 稳定的排序算法
3. 时间复杂度:
最好(正序): 时间复杂度为 O(n)
最坏(倒序): 时间复杂度为 O(n^2)
平均: O(n^2)
将数组中的数据分为两个区间,已排序区间和未排序区间
插入算法的核心思想是:
取未排序区间中的元素,在已排序区间中找到合适的插入位置将其插入,
并保证已排序区间数据一直有序。
重复这个过程,直到未排序区间中元素为空,算法结束。
插入排序也包含两种操作,一种是元素的比较,一种是元素的移动
移动次数就等于逆序度:
插入排序结果 移动元素个数
2 | 4 3 1 5 6 0
2 4 | 3 1 5 6 0
2 3 4 | 1 5 6 1
1 2 3 4 | 5 6 3
选择排序-Selection Sort¶
1. 原地排序算法
2. 非稳定排序算法
如: 5,8,5,2,9
第一次找到最小元素 2,与第一个 5 交换位置,
那第一个 5 和中间的 5 顺序就变了,所以就不稳定了
3. 时间复杂度:
最好情况时间复杂度、最坏情况和平均情况时间复杂度都为 O(n^2)
分已排序区间和未排序区间
每次会从未排序区间中找到最小的元素,将其放到已排序区间的末尾
插入排序比冒泡排序更受欢迎的原因:
冒泡排序的数据交换要比插入排序的数据移动要复杂,
冒泡排序需要 3 个赋值操作,而插入排序只需要 1 个
冒泡排序中数据的交换操作:
if (a[j] > a[j+1]) { // 交换
int tmp = a[j];
a[j] = a[j+1];
a[j+1] = tmp;
flag = true;
}
插入排序中数据的移动操作:
if (a[j] > value) {
a[j+1] = a[j]; // 数据移动
} else {
break;
}
归并排序-Merge Sort¶
备注
归并排序和快速排序都用到了分治思想,非常巧妙。我们可以借鉴这个思想,来解决非排序的问题,比如:如何在 O(n) 的时间复杂度内查找一个无序数组中的第 K 大元素?
备注
分治算法一般都是用递归来实现的。分治是一种解决问题的处理思想,递归是一种编程技巧
1. 空间复杂度:
非原地排序算法
空间复杂度就是 O(n)
2. 稳定排序算法
3. 时间复杂度:
最好情况、最坏情况,还是平均情况,时间复杂度都是O(nlogn)
时间复杂度计算过程:
不仅递归求解的问题可以写成递推公式,递归代码的时间复杂度也可以写成递推公式:
求解问题 a 的时间是 T(a),求解问题 b、c 的时间分别是 T(b) 和 T(c):
T(a) = T(b) + T(c) + K
其中 K 等于将两个子问题 b、c 的结果合并成问题 a 的结果所消耗的时间
2个点:
1. merge() 函数合并两个有序子数组的时间复杂度是 O(n)
2. n 个元素进行归并排序需要的时间是 T(n),那分解成两个子数组排序的时间都是 T(n/2)
归并排序的时间复杂度的计算公式:
T(1) = C; n=1时,只需要常量级的执行时间,所以表示为C。
T(n) = 2*T(n/2) + n; n>1
计算过程:
T(n) = 2*T(n/2) + n
= 2*(2*T(n/4) + n/2) + n = 4*T(n/4) + 2*n
= 4*(2*T(n/8) + n/4) + 2*n = 8*T(n/8) + 3*n
= 8*(2*T(n/16) + n/8) + 3*n = 16*T(n/16) + 4*n
......
= 2^k * T(n/2^k) + k * n
......
终止条件:
T(n/2^k)=T(1)=C
即: n/2^k=1
即: k=log2n
T(n)=2^log2n * T(1) + log2n*n = Cn+nlog2n
用大 O 标记法来表示的话,T(n) 就等于 O(nlogn)。
所以归并排序的时间复杂度是 O(nlogn)
快速排序算法-Quicksort¶
快排的思想是这样的:
如果要排序数组中下标从 p 到 r 之间的一组数据,
我们选择 p 到 r 之间的任意一个数据作为 pivot(分区点)
遍历 p 到 r 之间的数据,将小于 pivot 的放到左边,将大于 pivot 的放到右边,将 pivot 放到中间
1. 空间复杂度:
原地排序算法
空间复杂度就是 O(1)
2. 非稳定排序算法
3. 时间复杂度:
最好情况时间复杂度都是O(nlogn)
最坏情况是 O(n^2)
大部分情况下的时间复杂度都可以做到 O(nlogn)
伪代码:
// 快速排序,A是数组,n表示数组的大小
quick_sort(A, n) {
quick_sort_c(A, 0, n-1)
}
// 快速排序递归函数,p,r为下标
quick_sort_c(A, p, r) {
if p >= r then return
q = partition(A, p, r) // 获取分区点
quick_sort_c(A, p, q-1)
quick_sort_c(A, q+1, r)
}
partition(A, p, r) {
pivot := A[r]
i := p
for j := p to r-1 do {
if A[j] < pivot {
swap A[i] with A[j]
i := i+1
}
}
swap A[i] with A[r]
return i
备注
归并排序的处理过程是由下到上的,先处理子问题,然后再合并。而快排正好相反,它的处理过程是由上到下的,先分区,然后再处理子问题。归并排序虽然是稳定的、时间复杂度为 O(nlogn) 的排序算法,但是它是非原地排序算法。
时间复杂度计算过程:
T(1) = C; n=1时,只需要常量级的执行时间,所以表示为C
T(n) = 2*T(n/2) + n; n>1
// 公式成立的前提是每次分区操作,我们选择的 pivot 都很合适,正好能将大区间对等地一分为二
最极端的情况需要进行大约 n 次分区操作,才能完成快排的整个过程
每次分区我们平均要扫描大约 n/2 个元素,
这种情况下,快排的时间复杂度就从 O(nlogn) 退化成了 O(n2)
用快排解决第 K 大元素:
计算过程:
1. 分成了三部分,A[0...p-1]、A[p]、A[p+1...n-1]
2. 如果 p+1=K,那 A[p]就是要求解的元素;
如果 K>p+1, 说明第 K 大元素出现在 A[p+1...n-1]区间
否则说明第 K 大元素出现在 A[0...p-1]区间
时间复杂度是 O(n):
第一次分区查找,我们需要对大小为 n 的数组执行分区操作,需要遍历 n 个元素。
第二次分区查找,我们只需要对大小为 n/2 的数组执行分区操作,需要遍历 n/2 个元素。
依次类推,分区遍历元素的个数分别为、n/2、n/4、n/8、n/16.……直到区间缩小为 1
即:
n+n/2+n/4+n/8+...+1=2n-1
用普通解决第 K 大元素:
每次取数组中的最小值,将其移动到数组的最前面,
然后在剩下的数组中继续找最小值,以此类推,执行 K 次
时间复杂度就并不是 O(n) 了,而是 O(K * n)
当 K 等于 n/2 或者 n 时,这种最坏情况下的时间复杂度就是 O(n2) 了
备注
现在你有 10 个接口访问日志文件,每个日志文件大小约 300MB,每个文件里的日志都是按照时间戳从小到大排序的。你希望将这 10 个较小的日志文件,合并为 1 个日志文件,合并之后的日志仍然按照时间戳从小到大排列。如果处理上述排序任务的机器内存只有 1GB,你有什么好的解决思路,能“快速”地将这 10 个日志文件合并吗?
利用哨兵减少了交换两个元素的复杂步骤:
private static void quickSort(int[] a, int head, int tail) {
int low = head;
int high = tail;
int pivot = a[low];
if (low < high) {
while (low<high) {
while (low < high && pivot <= a[high]) high--;
a[low] = a[high];
while (low < high && pivot >= a[low]) low++;
a[high]=a[low];
}
a[low] = pivot;
if(low>head+1) quickSort(a,head,low-1);
if(high<tail-1) quickSort(a,high+1,tail);
}
}
线性排序-Linear sort¶
三种时间复杂度是 O(n) 的排序算法:桶排序、计数排序、基数排序。因为这些排序算法的时间复杂度是线性的,所以我们把这类排序算法叫作线性排序(Linear sort)
桶排序-Bucket sort¶
如果要排序的数据有 n 个,我们把它们均匀地划分到 m 个桶内,每个桶里就有 k=n/m 个元素。每个桶内部使用快速排序,时间复杂度为 O(k * logk)。m 个桶排序的时间复杂度就是 O(m * k * logk),因为 k=n/m,所以整个桶排序的时间复杂度就是 O(n*log(n/m))。当桶的个数 m 接近数据个数 n 时,log(n/m) 就是一个非常小的常量,这个时候桶排序的时间复杂度接近 O(n)。
桶排序对要排序数据的要求是非常苛刻的:
1. 要排序的数据需要很容易就能划分成 m 个桶
2. 数据在各个桶之间的分布是比较均匀的
备注
桶排序比较适合用在外部排序中。所谓的外部排序就是数据存储在外部磁盘中,数据量比较大,内存有限,无法将数据全部加载到内存中。
计数排序-Counting sort¶
计数排序其实是桶排序的一种特殊情况。当要排序的 n 个数据,所处的范围并不大的时候,比如最大值是 k,我们就可以把数据划分成 k 个桶。每个桶内的数据值都是相同的,省掉了桶内排序的时间。
50万考生排序,满分是 900 分,最小是 0 分,这个数据的范围很小,所以我们可以分成 901 个桶,对应分数从 0 分到 900 分。
排序过程:
要排序的数组: A[8]
中间的桶: C[6]
排序后的数组: R[8]
要排序的数组: A[8] = 2,5,3,0,2,3,0,3
考生的成绩从 0 到 5 分,我们使用大小为 6 的数组 C[6]表示桶
C[6] = 2 0 2 3 0 1
对 C[6]数组顺序求和
C2[6] = 2 2 4 7 0 8
从后到前依次扫描数组 A。比如:
当扫描到 3 时,我们知道 C[3] 的值 7
则: R[7-1]=R[6]=3
然后 C[3] = C[3]-1
...
备注
计数排序只能用在数据范围不大的场景中,如果数据范围 k 比要排序的数据 n 大很多,就不适合用计数排序了。而且,计数排序只能给非负整数排序,如果要排序的数据是其他类型的,要将其在不改变相对大小的情况下,转化为非负整数。
基数排序-Radix sort¶
规律:
假设要比较两个手机号码 a,b 的大小,如果在前面几位中,a 手机号码已经比 b 手机号码大了,那后面的几位就不用看了
11位手机号码排序:
先按照最后一位来排序手机号码
然后,再按照倒数第二位重新排序
以此类推,最后按照第一位重新排序
经过 11 次排序之后,手机号码就都有序了
备注
【小技巧】要排序的数据并不都是等长的情况,可以把所有的数据补齐到相同长度,如:单词位数不够的可以在后面补“0”
排序优化¶

快速排序如何选择分区点:
1. 三数取中法
2. 随机法
快速排序是用递归来实现的,要警惕堆栈溢出:
1. 限制递归深度。一旦递归过深,超过了我们事先设定的阈值,就停止递归
2. 通过在堆上模拟实现一个函数调用栈,手动模拟递归压栈、出栈的过程
备注
实际在使用时可以使用多种排序算法,如 glic 中的 qsort 函数:1.排序数据量小时使用归并排序,2.数据量大时使用快速排序,3.在快速排序的过程中,当要排序的区间中,元素的个数小于等于 4 时,qsort() 就退化为插入排序。
二分查找¶
二分查找:
时间复杂度是 O(logn)
着重强调一下容易出错的 3 个地方:
1. 循环退出条件
2. mid 的取值
mid=(low+high)/2 这种写法是有问题的。
因为如果 low 和 high 比较大的话,两者之和就有可能会溢出
改进的方法是将 mid 的计算方式写成 low+(high-low)/2。
进一步性能优化: 可以将这里的除以 2 操作转化成位运算 low+((high-low)>>1)
3. low 和 high 的更新
限制:
1. 依赖的是顺序表结构,简单点说就是数组
2. 针对的是有序数据
3. 数据量太小不适合二分查找
4. 数据量太大也不适合二分查找
十个二分九个错:
唐纳德·克努特(Donald E.Knuth)在《计算机程序设计艺术》的第 3 卷《排序和查找》中说到:
“尽管第一个二分查找算法于 1946 年出现,然而第一个完全正确的二分查找算法实现直到 1962 年才出现。”
最简单的二分查找写起来确实不难,但是,二分查找的变形问题就没那么好写了
4 个变形问题:
1. 查找第一个值等于给定值的元素
2. 查找最后一个值等于给定值的元素
3. 查找第一个大于等于给定值的元素
4. 查找最后一个小于等于给定值的元素
注: 有重复数据的情形下
快速定位出一个 IP 地址的归属地:
示例:
[202.102.133.0, 202.102.133.255] 山东东营市
[202.102.135.0, 202.102.136.255] 山东烟台
[202.102.156.34, 202.102.157.255] 山东青岛
[202.102.48.0, 202.102.48.255] 江苏宿迁
[202.102.49.15, 202.102.51.251] 江苏泰州
[202.102.56.0, 202.102.56.255] 江苏连云港
将起始地址,按照对应的整型值的大小关系,从小到大进行排序。
IP 地址可以转化为 32 位的整型数。
问题就转化为第4个变形问题:
在有序数组中,查找最后一个小于等于某个给定值的元素
备注
凡是用二分查找能解决的,绝大部分我们更倾向于用散列表或者二叉查找树。即便是二分查找在内存使用上更节省,但是毕竟内存如此紧缺的情况并不多。二分查找更适合用在“近似”查找问题,在这类问题上,二分查找的优势更加明显。比如这几种变体问题
变体的二分查找算法写起来非常烧脑,很容易因为细节处理不好而产生 Bug,这些容易出错的细节有:
1. 终止条件
2. 区间上下界更新方法
3. 返回值选择
leetcode 33题
随机访问¶
顺序访问:
链表在内存中不是按顺序存放的,而是通过指针连在一起,
为了访问某一元素,必须从链头开始顺着指针才能找到某一个元素。
随机访问:
Sequential Access
数组在内存中是按顺序存放的,可以通过下标直接定位到某一个元素存放的位置。
跳表-Skip list¶
插入、删除、查找操作,时间复杂度都是 O(logn)
空间复杂度是 O(n)
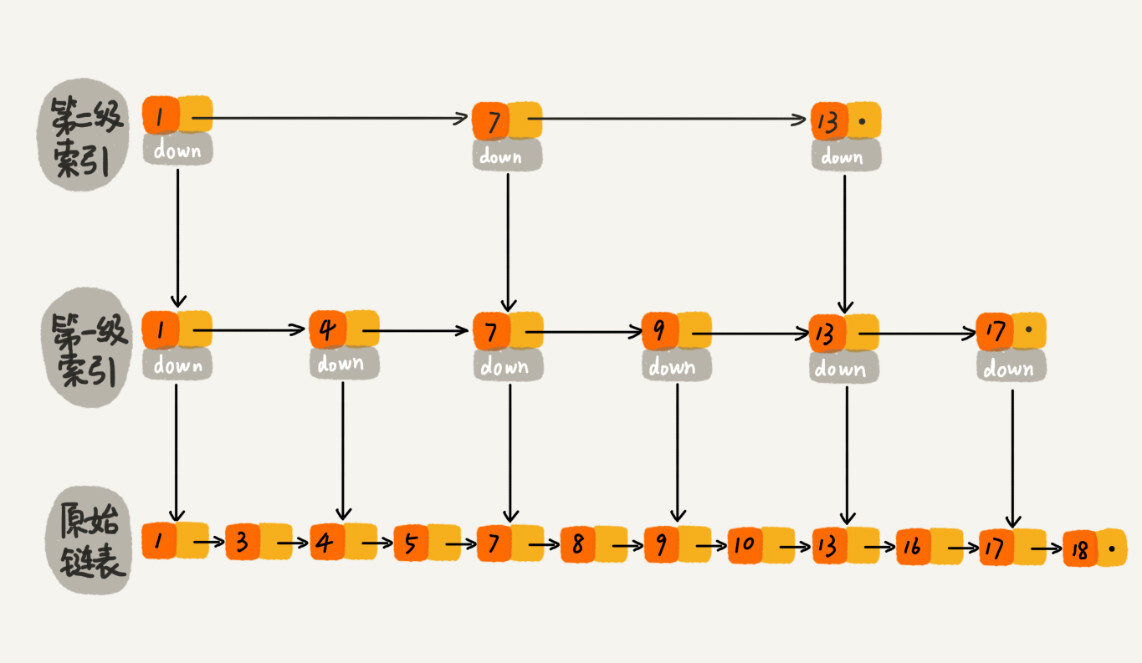
这种链表加多级索引的结构,就是跳表¶
备注
作为一种动态数据结构,我们需要某种手段来维护索引与原始链表大小之间的平衡。红黑树、AVL 树这样平衡二叉树,你就知道它们是通过左右旋的方式保持左右子树的大小平衡,而跳表是通过随机函数来维护前面提到的“平衡性”。
为什么 Redis 要用跳表来实现有序集合,而不是红黑树:
Redis 中的有序集合支持的核心操作主要有下面这几个:
1. 插入一个数据;
2. 删除一个数据;
3. 查找一个数据;
4. 按照区间查找数据(比如查找值在[100, 356]之间的数据);
5. 迭代输出有序序列
操作1235红黑树也可以完成,时间复杂度跟跳表是一样的
但是,操作4红黑树的效率没有跳表高
散列表-Hash Table¶
备注
散列表用的是数组支持按照下标随机访问数据的特性,所以散列表其实就是数组的一种扩展,由数组演化而来。
散列表两个核心问题:
1. 散列函数设计
2. 散列冲突解决
散列函数设计的三点基本要求:
1. 散列函数计算得到的散列值是一个非负整数
2. 如果 key1 = key2,那 hash(key1) == hash(key2)
3. 如果 key1 ≠ key2,那 hash(key1) ≠ hash(key2)
散列冲突解决方法:
1. 开放寻址法-open addressing
2. 链表法-chaining
开放寻址法-open addressing:
a. 线性探测-Linear Probing 在散列表中查找元素的过程有点儿类似插入过程。 我们通过散列函数求出要查找元素的键值对应的散列值,然后比较数组中下标为散列值的元素和要查找的元素。 如果相等,则说明就是我们要找的元素;否则就顺序往后依次查找。 如果遍历到数组中的空闲位置,还没有找到,就说明要查找的元素并没有在散列表中。 注意: 删除操作稍微有些特别,不能单纯地把要删除的元素设置为空 可以将删除的元素,特殊标记为 deleted b. 二次探测-Quadratic probing 跟线性探测很像,线性探测每次探测的步长是 1, 它探测的下标序列就是 hash(key)+0,hash(key)+1,hash(key)+2…… 而二次探测探测的步长就变成了原来的“二次方”,也就是说, 它探测的下标序列就是 hash(key)+0,hash(key)+1^2,hash(key)+2^2…… c. 双重散列-Double hashing 意思就是不仅要使用一个散列函数。 我们使用一组散列函数 hash1(key),hash2(key),hash3(key)…… 我们先用第一个散列函数,如果计算得到的存储位置已经被占用,再用第二个散列函数, 依次类推,直到找到空闲的存储位置 优点: 1. 散列表中的数据都存储在数组中,可以有效地利用 CPU 缓存加快查询速度 2. 这种方法实现的散列表,序列化起来比较简单 缺点: 1. 删除数据的时候比较麻烦,需要特殊标记已经删除掉的数据 2. 冲突的代价更高: 所以,使用开放寻址法解决冲突的散列表,装载因子的上限不能太大。 这也导致这种方法比链表法更浪费内存空间
备注
当数据量比较小、装载因子小的时候,适合采用开放寻址法
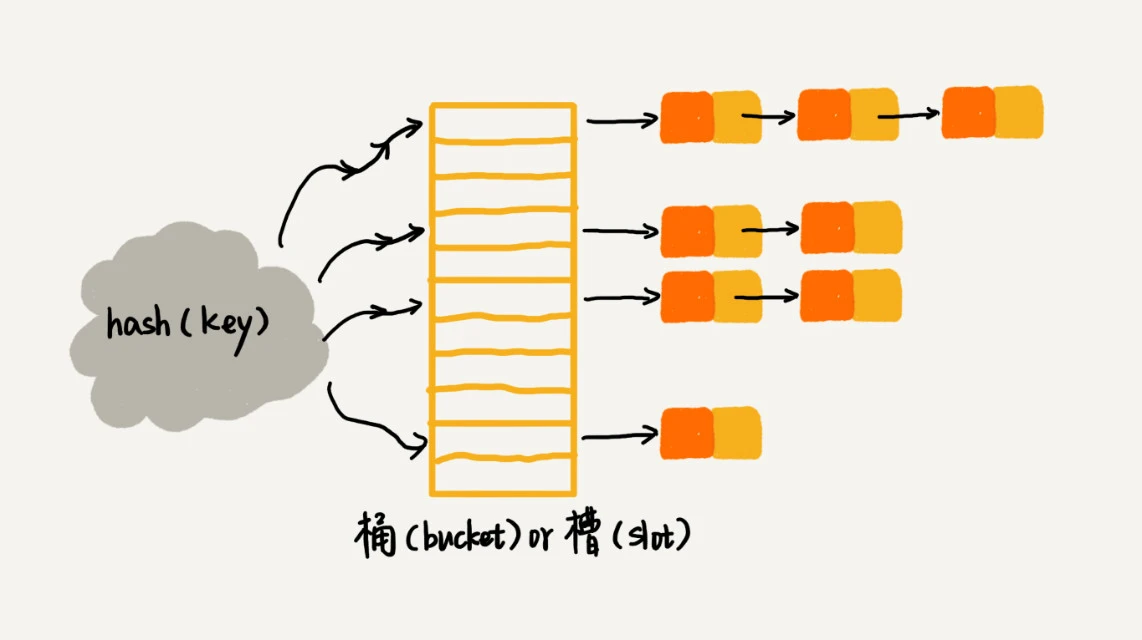
链表法-chaining:
链表法是一种更加常用的散列冲突解决办法,相比开放寻址法,它要简单很多 优点: a. 对内存的利用率比开放寻址法要高 b. 对大装载因子的容忍度更高 缺点: a. 链表中的结点是零散分布在内存中的,不是连续的 所以对 CPU 缓存是不友好的,这方面对于执行效率也有一定的影响 b. 比较消耗内存的,还有可能会让内存的消耗翻倍 若存储的是大对象,即要存储的对象的大小远大于一个指针的大小(4 个字节或者 8 个字节) 那链表中指针的内存消耗在大对象面前就可以忽略了
备注
基于链表的散列冲突处理方法比较适合存储大对象、大数据量的散列表,而且,比起开放寻址法,它更加灵活,支持更多的优化策略,比如用红黑树代替链表。
装载因子(load factor)用来表示空位的多少:
装载因子是数组的装载率。反映的是数组填满的程度。装载因子越大,说明冲突越多。
散列表的装载因子=填入表中的元素个数/散列表的长度
装载因子越大,说明空闲位置越少,冲突越多,散列表的性能会下降。
好的散列函数:
1. 散列函数的设计不能太复杂
过于复杂的散列函数,势必会消耗很多计算时间,也就间接地影响到散列表的性能
2. 散列函数生成的值要尽可能随机并且均匀分布
这样才能避免或者最小化散列冲突,而且即便出现冲突,
散列到每个槽里的数据也会比较平均,不会出现某个槽内数据特别多的情况
散列函数的设计方法:
1. 数据分析法: 取手机号的后四位作为散列值
2. 将单词中每个字母的ASCII 码值“进位”相加,然后再跟散列表的大小求余、取模
3. 其他: 直接寻址法、平方取中法、折叠法、随机数法
动态扩容:
当散列表的装载因子超过某个阈值时,就需要进行扩容
如何避免低效的扩容:
1. “一次性”扩容的机制
先进行扩容,再插入数据
缺点: 扩容时,插入数据就会变得很慢,甚至会无法接受
2. 分批扩容
将扩容操作穿插在插入操作的过程中,分批完成
操作:
对于插入操作,先将新数据插入新散列表中,并且从老的散列表中拿出一个数据放入到新散列表
对于查询操作,先从新散列表中查找,如果没有找到,再去老的散列表中查找
工业级的散列表应该具有哪些特性:
1. 支持快速地查询、插入、删除操作
2. 内存占用合理,不能浪费过多的内存空间
3. 性能稳定,极端情况下,散列表的性能也不会退化到无法接受的情况
如何实现这样一个工业级的散列表:
1. 设计一个合适的散列函数
2. 定义装载因子阈值,并且设计动态扩容策略
3. 选择合适的散列冲突解决方法
散列表和链表组合¶
LRU 缓存淘汰算法¶
一个缓存(cache)系统主要包含下面这几个操作:
1. 往缓存中添加一个数据
2. 从缓存中删除一个数据
3. 在缓存中查找一个数据
说明: 这三个操作都需要「查找」操作
如果单纯地采用链表的话,时间复杂度只能是 O(n)
如果我们将散列表和链表两种数据结构组合使用,可以将这三个操作的时间复杂度都降低到 O(1)
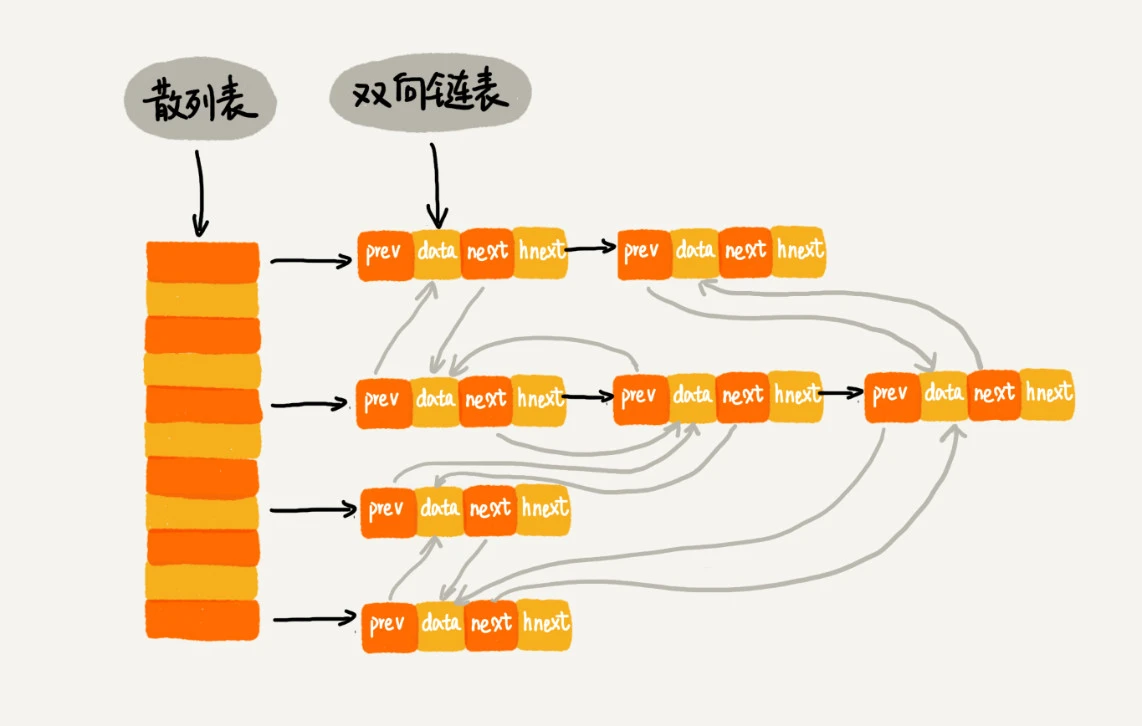
散列表这种数据结构虽然支持非常高效的数据插入、删除、查找操作,但是散列表中的数据都是通过散列函数打乱之后无规律存储的。也就说,它无法支持按照某种顺序快速地遍历数据。如果希望按照顺序遍历散列表中的数据,那我们需要将散列表中的数据拷贝到数组中,然后排序,再遍历。 因为散列表是动态数据结构,不停地有数据的插入、删除,所以每当我们希望按顺序遍历散列表中的数据的时候,都需要先排序,那效率势必会很低。为了解决这个问题,我们将散列表和链表(或者跳表)结合在一起使用。
哈希算法¶
一个优秀的哈希算法:
1. 从哈希值不能反向推导出原始数据(所以哈希算法也叫单向哈希算法)
2. 对输入数据非常敏感,哪怕原始数据只修改了一个 Bit,最后得到的哈希值也大不相同
3. 散列冲突的概率要很小,对于不同的原始数据,哈希值相同的概率非常小
4. 哈希算法的执行效率要尽量高效,针对较长的文本,也能快速地计算出哈希值
哈希算法的应用:
1. 安全加密
鸽巢原理(也叫抽屉原理)
2. 唯一标识
用于检测两文件是否完全一样
如: 百度网盘的文件秒传功能
3. 数据校验
用于检测文件是否被篡改
4. 散列函数
5. 负载均衡
6. 数据分片
7. 分布式存储
一致性哈希算法¶
备注
[基本思想]假设我们有 k 个机器,数据的哈希值的范围是 [0, MAX]。我们将整个范围划分成 m 个小区间(m 远大于 k),每个机器负责 m/k 个小区间。当有新机器加入的时候,我们就将某几个小区间的数据,从原来的机器中搬移到新的机器中。这样,既不用全部重新哈希、搬移数据,也保持了各个机器上数据数量的均衡。
树¶
定义:
父节点、子节点、兄弟节点
叶子节点或者叶节点、根节点
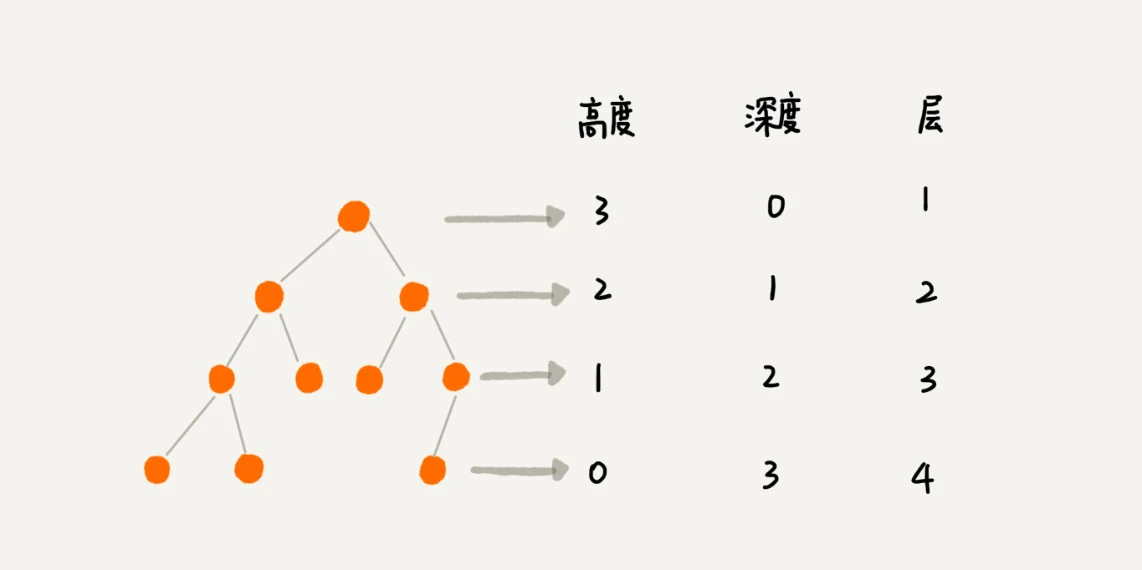
三个比较相似的概念:
1. 高度: Height
节点到叶子节点的最长路径(边数)
2. 深度: Depth
根节点到这个节点所经历的边数
3. 层: Level
结点深度+1
树的高度=根结点的高度
二叉树-Binary Tree¶
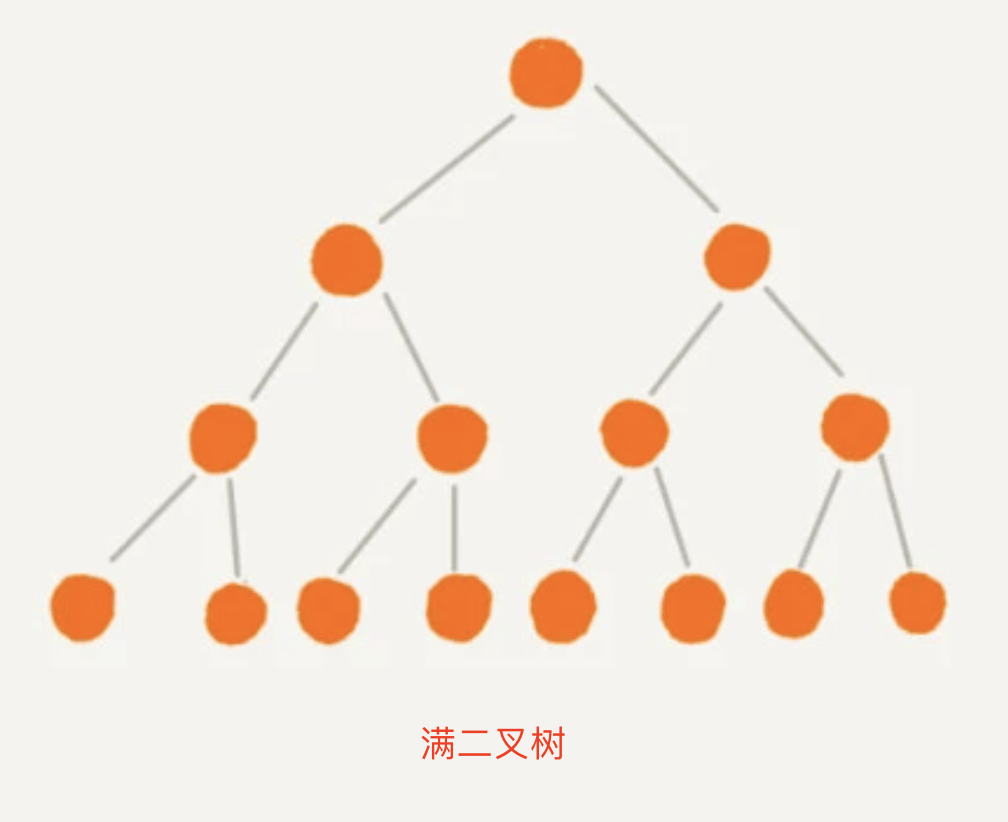
满二叉树:
叶子节点全都在最底层,除了叶子节点之外,每个节点都有左右两个子节点
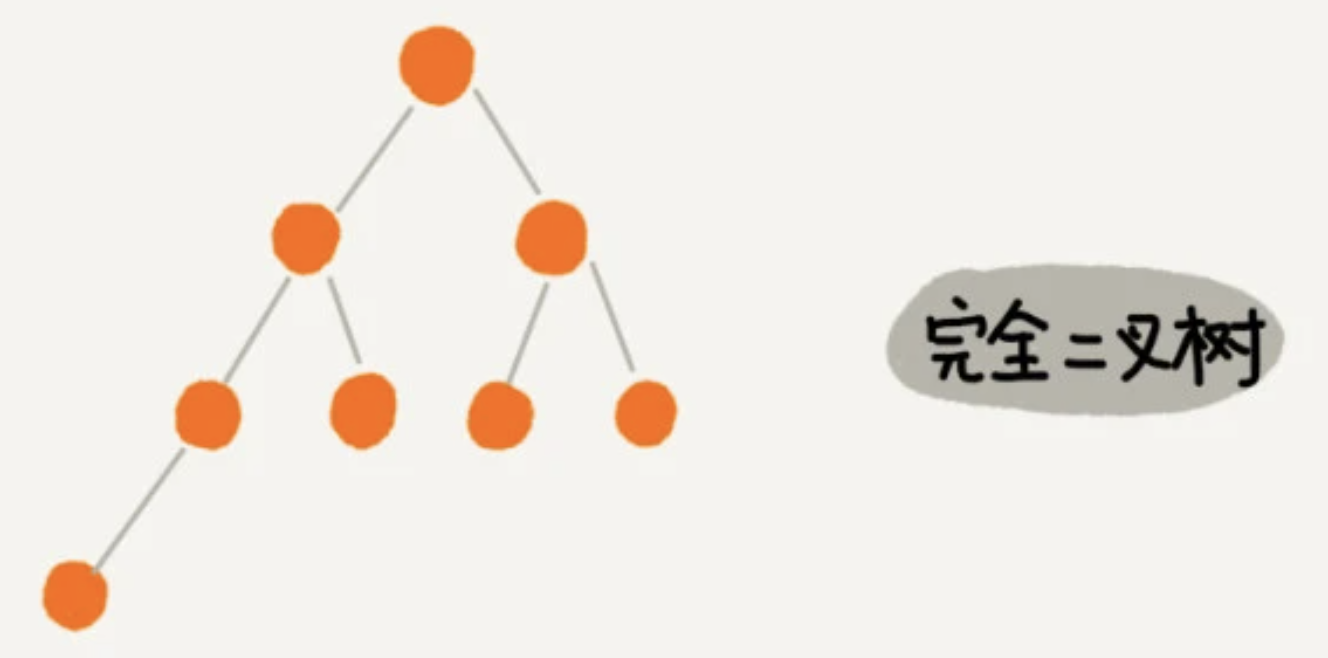
完全二叉树:
叶子节点都在最底下两层,最后一层的叶子节点都靠左排列,
并且除了最后一层,其他层的节点个数都要达到最大
两种方法:
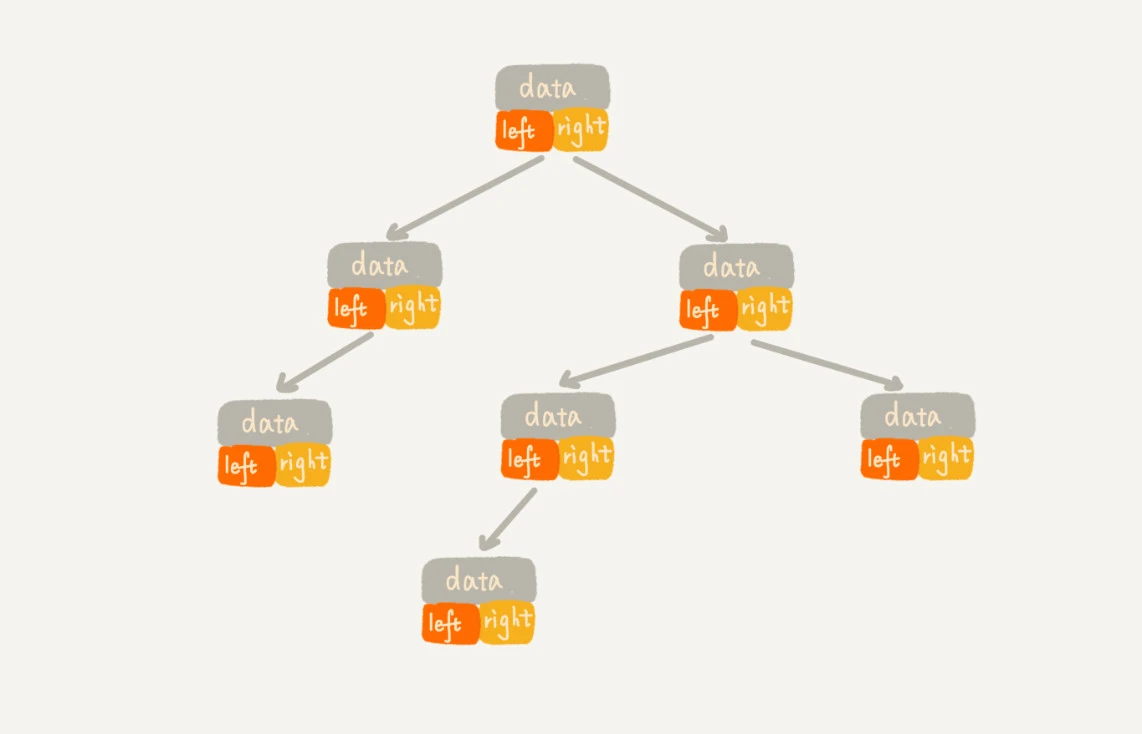
1. 一种是基于指针或者引用的二叉链式存储法
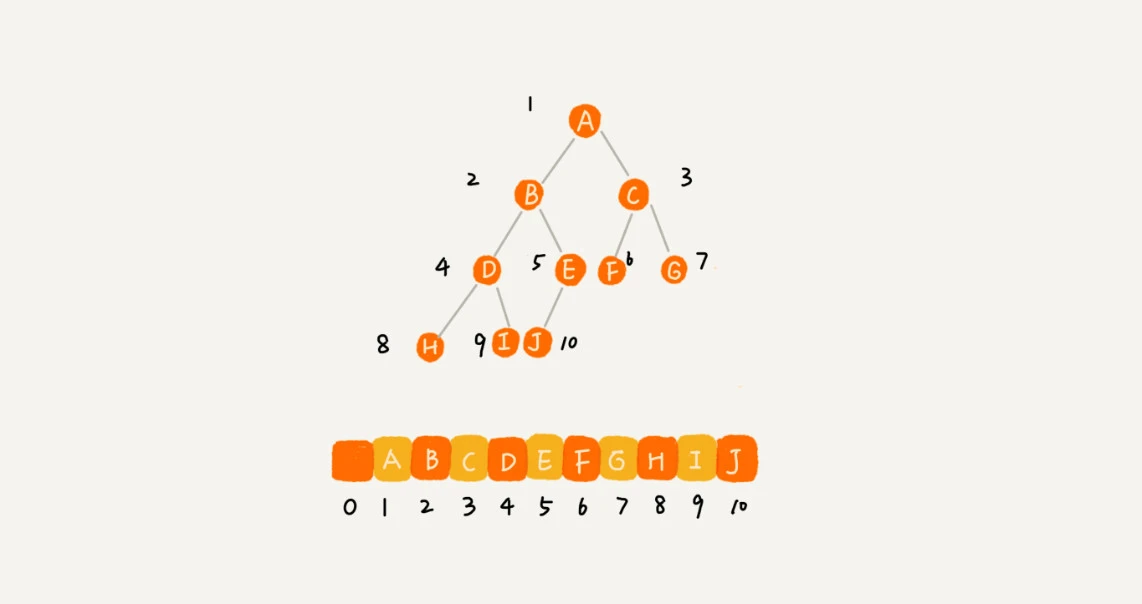
2. 一种是基于数组的顺序存储法
链式存储法:
每个节点有三个字段,其中一个存储数据,另外两个是指向左右子节点的指针。 我们只要拎住根节点,就可以通过左右子节点的指针,把整棵树都串起来。 这种存储方式我们比较常用。大部分二叉树代码都是通过这种结构来实现的。
顺序存储法:
把根节点存储在下标 i = 1 的位置, 左子节点存储在下标 2 * i = 2 的位置, 右子节点存储在 2 * i + 1 = 3 的位置。 以此类推,B 节点的: 左子节点存储在 2 * i = 2 * 2 = 4 的位置 右子节点存储在 2 * i + 1 = 2 * 2 + 1 = 5 的位置
备注
如果某棵二叉树是一棵完全二叉树,那用数组存储无疑是最节省内存的一种方式。堆其实就是一种完全二叉树,最常用的存储方式就是数组。
二叉树的遍历¶
经典的方法有三种(DFS, 深度优先):
1. 前序遍历
对于树中的任意节点来说,先打印这个节点,然后再打印它的左子树,最后打印它的右子树
2. 中序遍历
对于树中的任意节点来说,先打印它的左子树,然后再打印它本身,最后打印它的右子树
3. 后序遍历
对于树中的任意节点来说,先打印它的左子树,然后再打印它的右子树,最后打印这个节点本身
https://leetcode.com/problems/binary-tree-level-order-traversal/
leetcode:94、105、106、889
二叉树的4种遍历方式: https://mp.weixin.qq.com/s/0b5OsnFLLg18Td4CuR51_Q
二叉查找树-Binary Search Tree¶
也叫二叉搜索树
也叫二叉排序树
为了实现快速查找而生的
二叉查找树要求:
在树中的任意一个节点:
其左子树中的每个节点的值,都要小于这个节点的值,
而右子树节点的值都大于这个节点的值
基本操作:
1. 二叉查找树的查找操作
2. 二叉查找树的插入操作
3. 二叉查找树的删除操作
分三种情况:
a. 要删除的节点没有子节点
b. 要删除的节点只有一个子节点
c. 要删除的节点有两个子节点
找到这个节点的右子树中的最小节点,把它替换到要删除的节点上。
然后再删除掉这个最小节点
4. 二叉查找树的其他操作
支持快速地查找最大节点和最小节点、前驱节点和后继节点
支持重复数据的二叉查找树:
1. 第一种方法比较容易。
二叉查找树中每一个节点不仅会存储一个数据,
因此我们通过链表和支持动态扩容的数组等数据结构,把值相同的数据都存储在同一个节点上。
2. 第二种方法比较不好理解,不过更加优雅。
每个节点仍然只存储一个数据。
在查找插入位置的过程中,如果碰到一个节点的值,与要插入数据的值相同,
我们就将这个要插入的数据放到这个节点的右子树,
也就是说,把这个新插入的数据当作大于这个节点的值来处理。
不管操作是插入、删除还是查找,时间复杂度其实都跟树的高度成正比,也就是 O(height) 完全二叉树的高度小于等于 log2n
相对散列表,二叉查找树有什么优势:
1. 散列表中的数据是无序存储的,如果要输出有序的数据,需要先进行排序
2. 散列表扩容耗时很多,而且当遇到散列冲突时,性能不稳定
尽管二叉查找树的性能不稳定
但是平衡二叉查找树的性能非常稳定,时间复杂度稳定在 O(logn)
3. 散列表的查找等操作并不一定快:
尽管散列表的查找等操作的时间复杂度是常量级的,
但因为哈希冲突的存在,这个常量不一定比 logn 小,
所以实际的查找速度可能不一定比 O(logn) 快。
加上哈希函数的耗时,也不一定就比平衡二叉查找树的效率高
4. 散列表的构造比二叉查找树要复杂,需要考虑的东西很多
比如散列函数的设计、冲突解决办法、扩容、缩容等。
平衡二叉查找树只需要考虑平衡性这一个问题,而且这个问题的解决方案比较成熟、固定
5. 浪费一定的存储空间
为了避免过多的散列冲突,散列表装载因子不能太大,
特别是基于开放寻址法解决冲突的散列表
leetcode 104 题,可以使用递归法
二叉查找树的删除操作(无重复的数据)leetcode 450
平衡二叉查找树¶
备注
二叉树中任意一个节点的左右子树的高度相差不能大于 1。红黑树的代码实现应该是最复杂的一个了,需要关注左旋、右旋。
最先被发明的平衡二叉查找树是AVL 树
Splay Tree(伸展树)
Treap(树堆)
红黑树-Red-Black Tree¶
R-B Tree
是一种不严格的平衡二叉查找树
红黑树中的节点,一类被标记为黑色,一类被标记为红色。除此之外,一棵红黑树还需要满足这样几个要求:
1. 根节点是黑色的
2. 每个叶子节点都是黑色的空节点(NIL),也就是说,叶子节点不存储数据
这一步主要是为了简化红黑树的代码实现而设置
3. 任何相邻的节点都不能同时为红色,也就是说,红色节点是被黑色节点隔开的
4. 每个节点,从该节点到达其可达叶子节点的所有路径,都包含相同数目的黑色节点
备注
平衡二叉查找树的初衷,是为了解决二叉查找树因为动态更新导致的性能退化问题。所以,“平衡”的意思可以等价为性能不退化。“近似平衡”就等价为性能不会退化得太严重。
在工程中大家都喜欢用红黑树:
Treap、Splay Tree,绝大部分情况下,它们操作的效率都很高,
但是也无法避免极端情况下时间复杂度的退化。
尽管这种情况出现的概率不大,但是对于单次操作时间非常敏感的场景来说,它们并不适用。
AVL 树是一种高度平衡的二叉树,所以查找的效率非常高
AVL 树为了维持这种高度的平衡,就要付出更多的代价
每次插入、删除都要做调整,就比较复杂、耗时
对于有频繁的插入、删除操作的数据集合,使用 AVL 树的代价就有点高了
红黑树只是做到了近似平衡,并不是严格的平衡,
所以在维护平衡的成本上,要比 AVL 树要低。
红黑树的插入、删除、查找各种操作性能都比较稳定
备注
红黑树是一种性能非常稳定的二叉查找树,所以,在工程中,但凡是用到动态插入、删除、查找数据的场景,都可以用到它。不过,它实现起来比较复杂,如果自己写代码实现,难度会有些高,这个时候,我们其实更倾向用跳表来替代它。
递归树¶
备注
借助递归树来分析递归算法的时间复杂度。
备注
把递归过程一层一层的分解过程画成图,它其实就是一棵树。我们给这棵树起一个名字,叫作递归树。
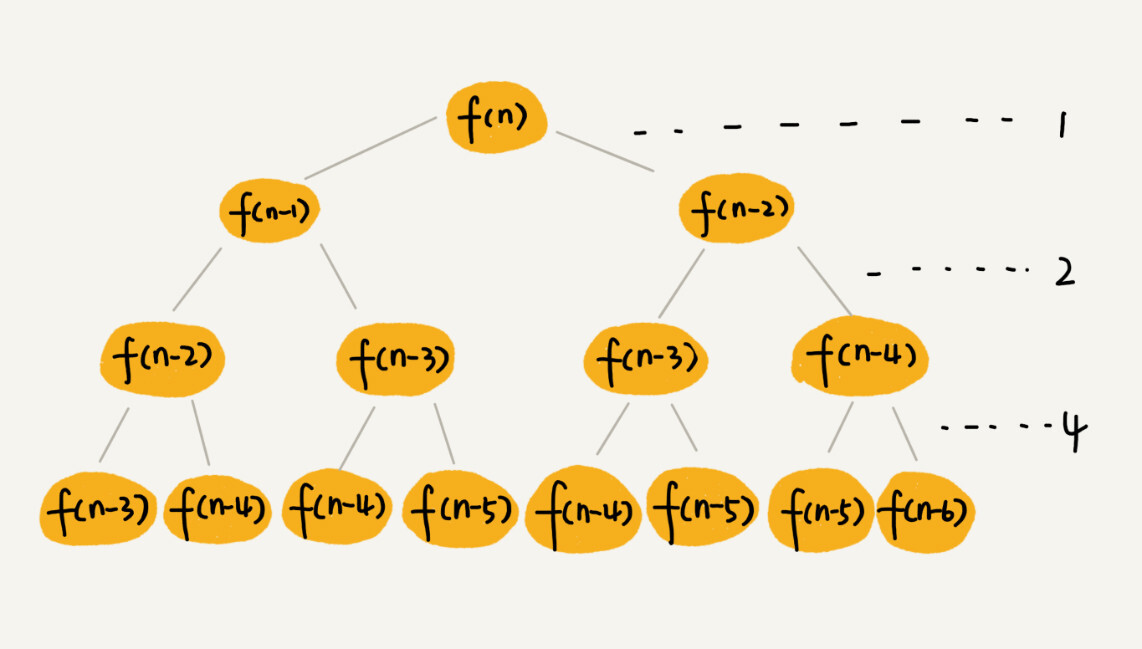
一棵斐波那契数列的递归树¶
- 这棵递归树的高度是多少:
f(n) 分解为 f(n−1) 和 f(n−2),每次数据规模都是 −1 或者 −2 叶子节点的数据规模是 1 或者 2 从根节点走到叶子节点,每条路径是长短不一的 1. 最长路径就是最左边这条,每次都是 −1,高度大约就是 n 2. 最短路径就是最右边这条,每次都是 −2,高度大约就是 n/2
- 每次分解之后的合并操作只需要一次加法运算,时间消耗记作 1
- 如果路径长度都为 n,那这个总和就是:
1+2+2^2+2^3…+2^(n-1)=2^n-1
- 如果路径长度都为 n/2,那这个总和就是:
2^(n/2)-1
这个算法的时间复杂度就介于 O(2^n)和O(2^(n/2))之间
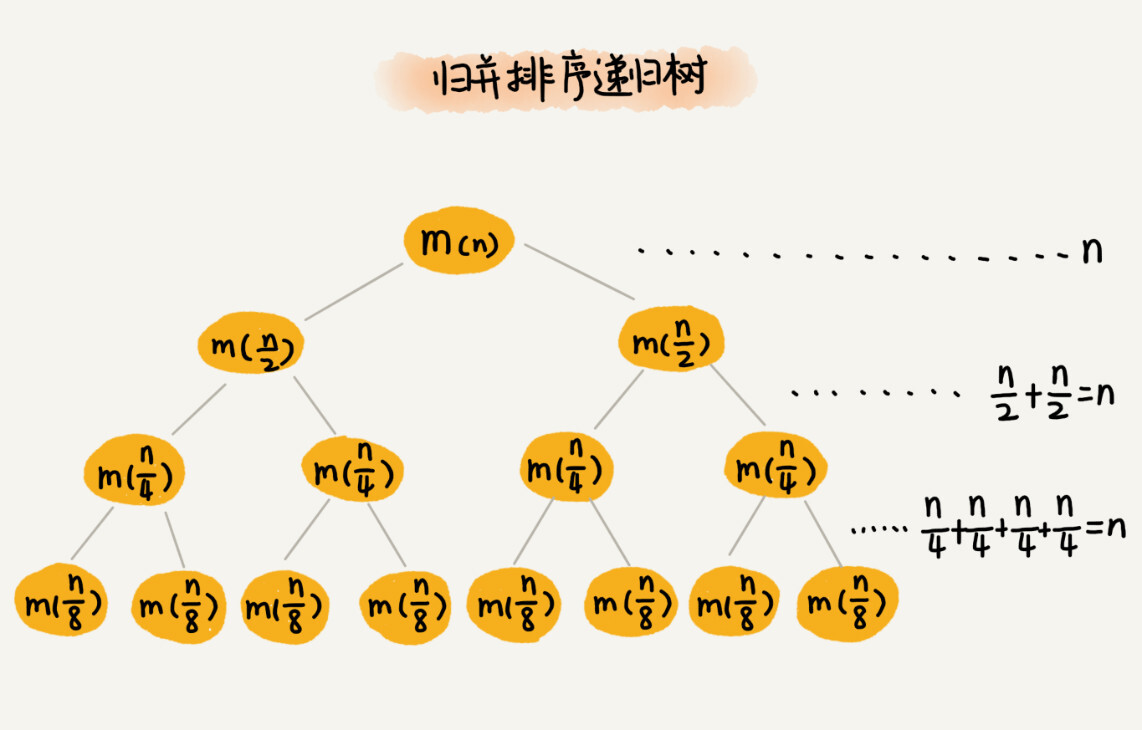
每次分解都是一分为二,所以代价很低,我们把时间上的消耗记作常量 1。归并算法中比较耗时的是归并操作,也就是把两个子数组合并为大数组。从图中我们可以看出,每一层归并操作消耗的时间总和是一样的,跟要排序的数据规模有关。我们把每一层归并操作消耗的时间记作 n。 从归并排序的原理和递归树,可以看出来,归并排序递归树是一棵满二叉树。我们前两节中讲到,满二叉树的高度大约是 log2n,所以,归并排序递归实现的时间复杂度就是 O(nlogn)。¶
备注
两种递归代码的时间复杂度分析方法:有些代码比较适合用递推公式来分析,比如归并排序的时间复杂度、快速排序的最好情况时间复杂度;有些比较适合采用递归树来分析,比如快速排序的平均时间复杂度。而有些可能两个都不怎么适合使用,比如二叉树的递归前中后序遍历。
1 个细胞的生命周期是 3 小时,1 小时分裂一次。求 n 小时后,容器内有多少细胞:
if n==0 f(n)=1
if n==1 f(n)=2
if n==2 f(n)=4
if n==3 f(n)=7
if n>=4 f(n) = f(n-1)*2 - (f(n-3)-f(n-4))
堆和堆排序¶
堆的定义:
堆是一个完全二叉树
堆中每一个节点的值都必须大于等于(或小于等于)其子树中每个节点的值
大顶堆、小顶堆
堆化: heapify
建堆过程的时间复杂度是 O(n)
排序过程的时间复杂度是 O(nlogn)
所以,堆排序整体的时间复杂度是 O(nlogn)
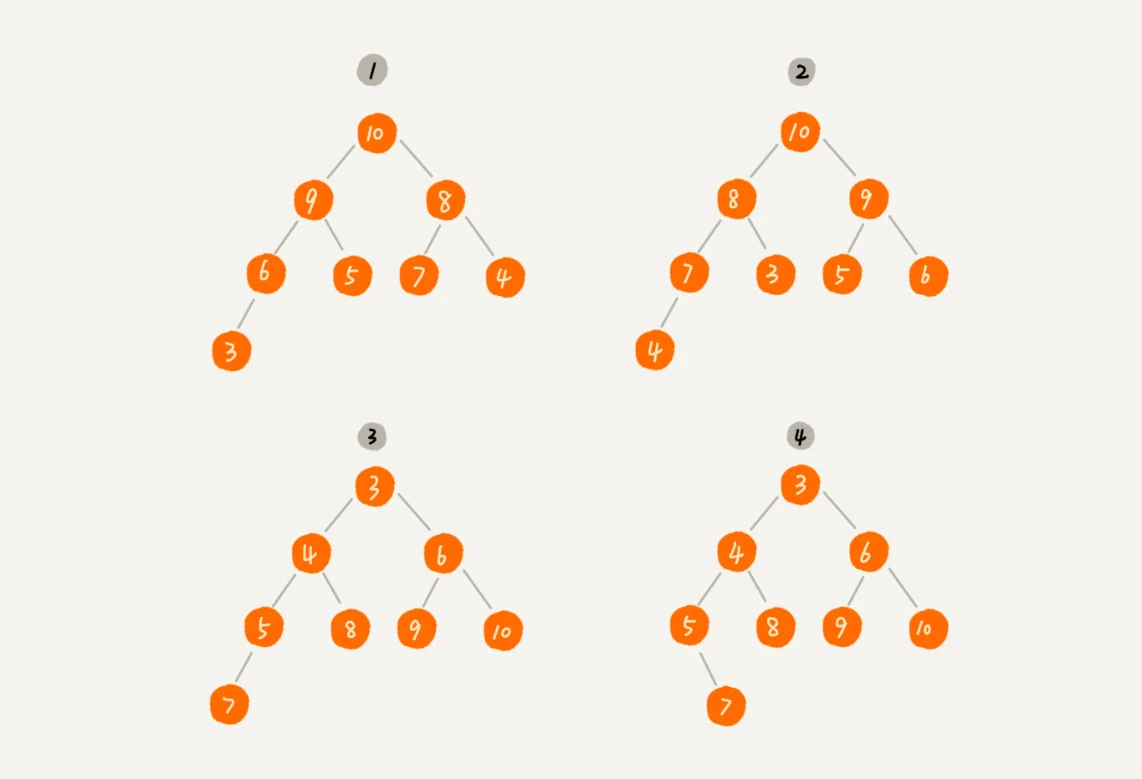
其中第 1 个和第 2 个是大顶堆,第 3 个是小顶堆,第 4 个不是堆。除此之外,从图中还可以看出来,对于同一组数据,我们可以构建多种不同形态的堆。¶
1.往堆中插入一个元素: 堆化非常简单,就是顺着节点所在的路径,向上或者向下,对比,然后交换。¶
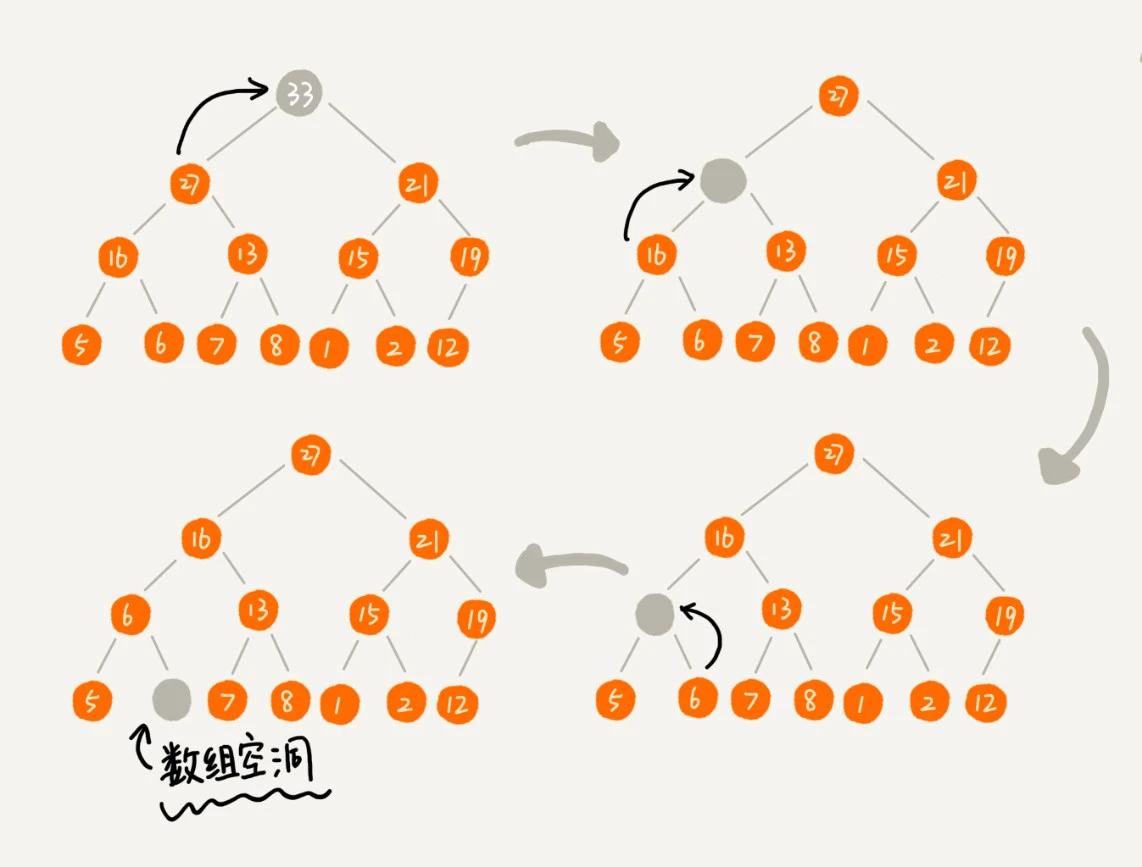
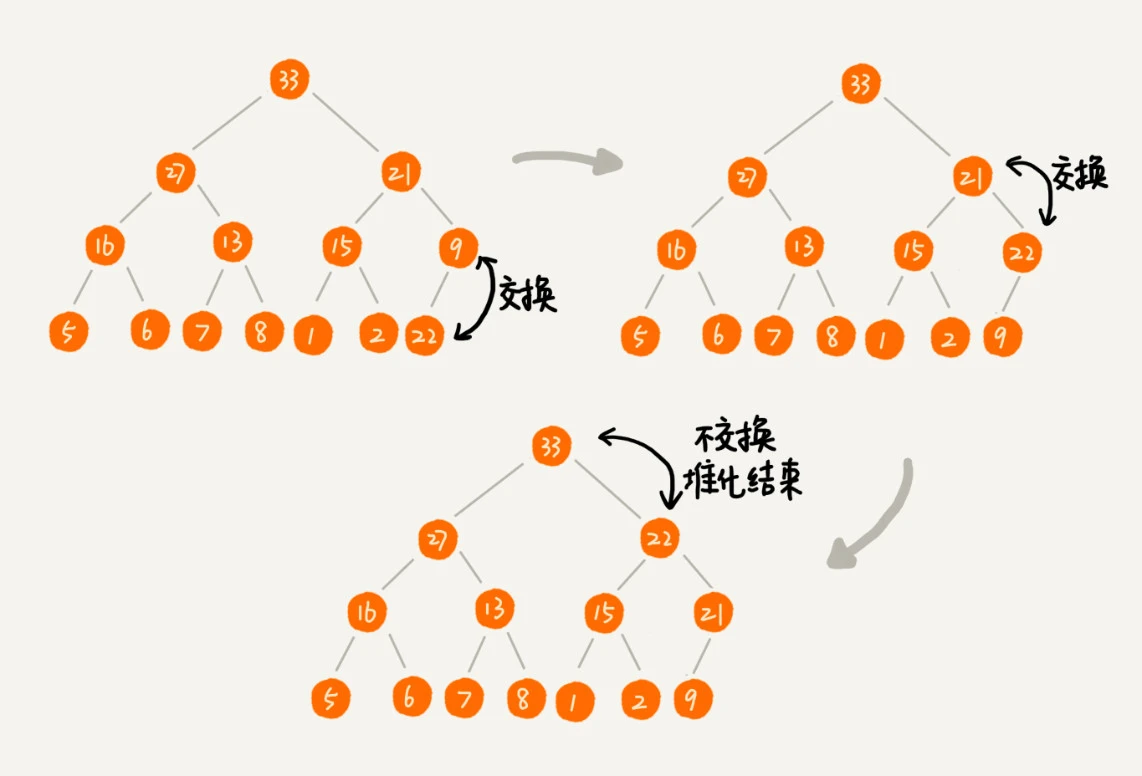
2.删除堆顶元素: 按上面的方法有点问题,就是最后堆化出来的堆并不满足完全二叉树的特性。¶
2.删除堆顶元素: 稍微改变一下思路,把最后一个节点放到堆顶,然后利用同样的父子节点对比方法。这就是从上往下的堆化方法。因为我们移除的是数组中的最后一个元素,而在堆化的过程中,都是交换操作,不会出现数组中的“空洞”,所以这种方法堆化之后的结果,肯定满足完全二叉树的特性。¶
备注
堆化的时间复杂度跟树的高度成正比,也就是 O(logn)。插入数据和删除堆顶元素的主要逻辑就是堆化,所以,往堆中插入一个元素和删除堆顶元素的时间复杂度都是 O(logn)。
备注
借助于堆这种数据结构实现的排序算法,就叫做堆排序。这种排序方法的时间复杂度非常稳定,是 O(nlogn),并且它还是原地排序算法。
堆排序¶
堆排序的过程大致分解成两个大的步骤:
1. 建堆
2. 排序
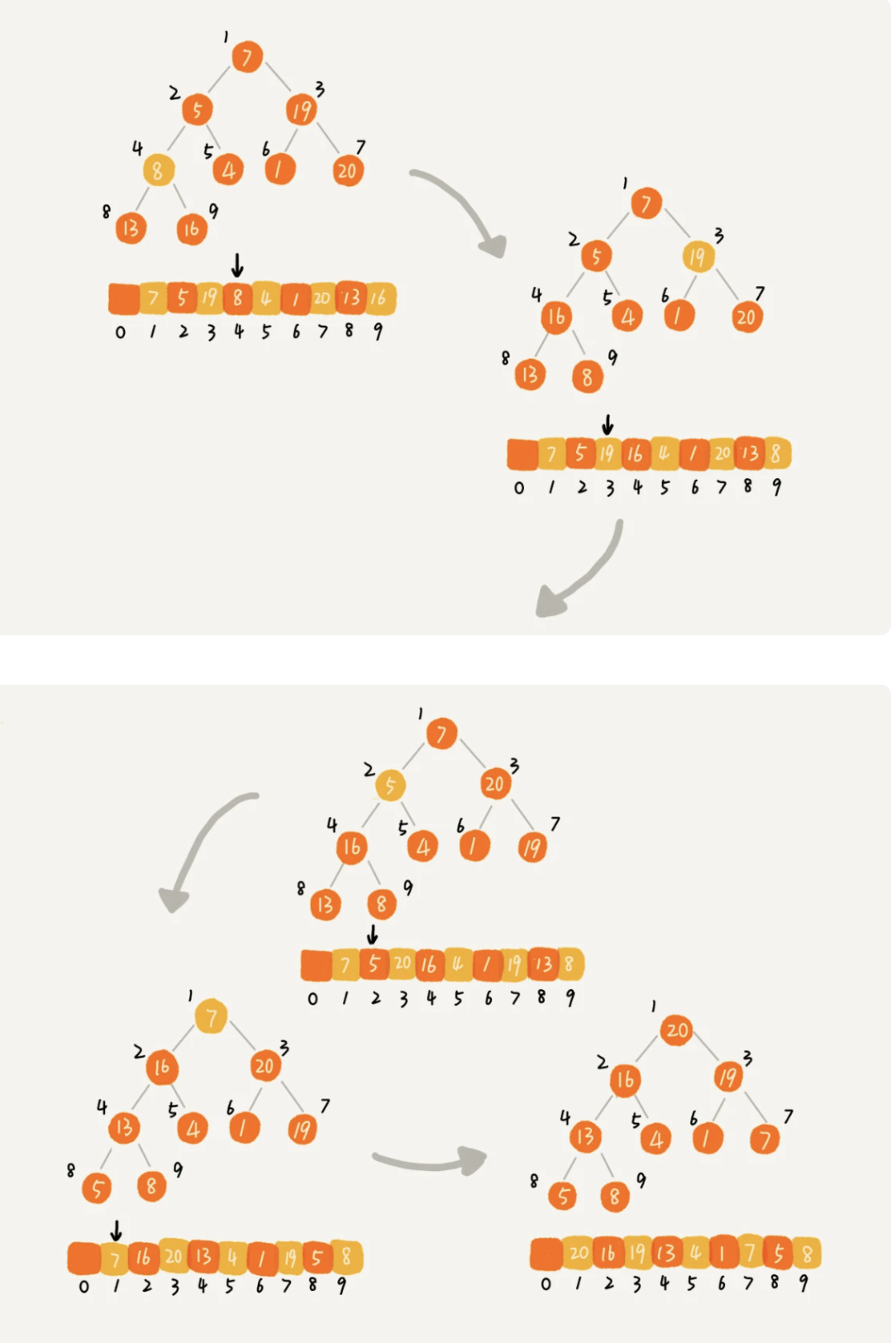
建堆:
a. 在堆中插入一个元素的思路 尽管数组中包含 n 个数据,但是我们可以假设,起初堆中只包含一个数据,就是下标为 1 的数据。 然后,我们调用前面讲的插入操作,将下标从 2 到 n 的数据依次插入到堆中。 这样我们就将包含 n 个数据的数组,组织成了堆。 b. 从后往前处理数组,并且每个数据都是从上往下堆化
从上往下堆化分解步骤图¶
排序:
这个过程有点类似上面讲的“删除堆顶元素”的操作, 当堆顶元素移除之后,我们把下标为 n 的元素放到堆顶, 然后再通过堆化的方法,将剩下的 n−1 个元素重新构建成堆
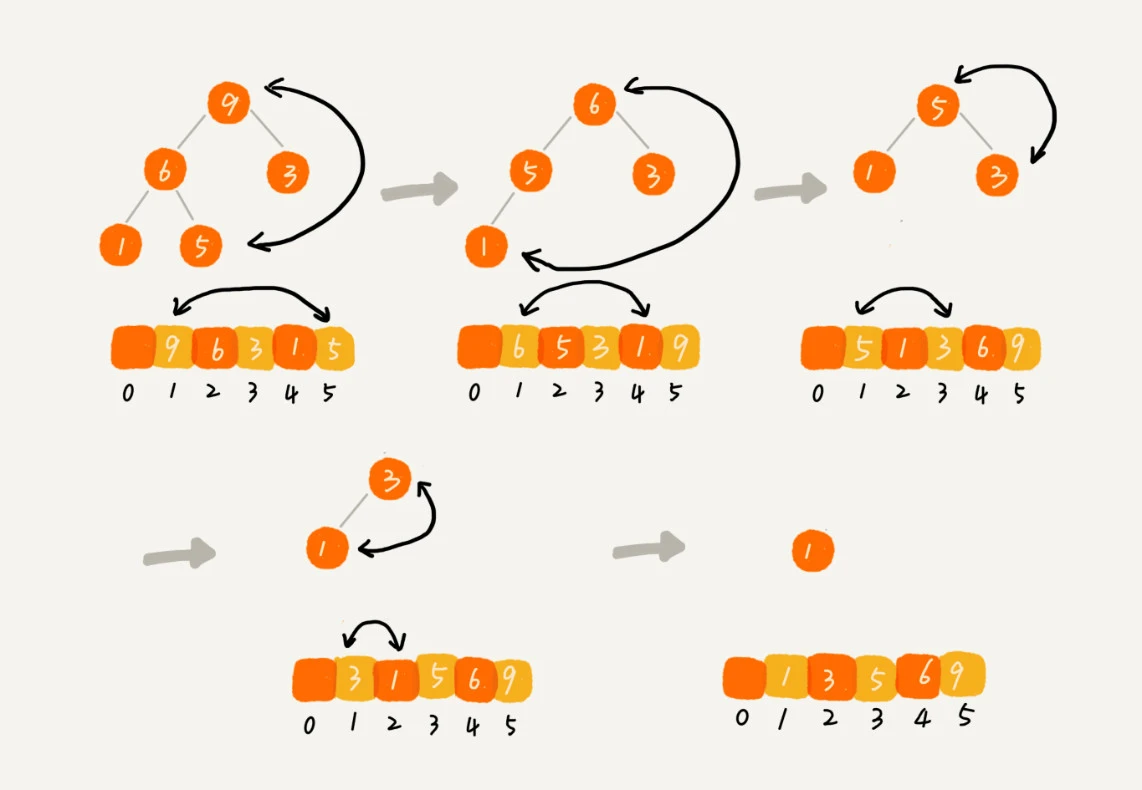
堆排序的过程分解步骤图¶
为什么快速排序要比堆排序性能好:
1. 堆排序数据访问的方式没有快速排序友好
对于快速排序来说,数据是顺序访问的。而对于堆排序来说,数据是跳着访问的
这样对 CPU 缓存是不友好的
2. 对于同样的数据,在排序过程中,堆排序算法的数据交换次数要多于快速排序。
堆的应用-优先队列¶
Java 的 PriorityQueue,C++ 的 priority_queue
赫夫曼编码、图的最短路径、最小生成树算法
堆和优先级队列非常相似:
一个堆就可以看作一个优先级队列。只是概念上的区分而已。
往优先级队列中插入一个元素,就相当于往堆中插入一个元素;
从优先级队列中取出优先级最高的元素,就相当于取出堆顶元素。
[实战]合并有序小文件:
假设我们有 100 个小文件,每个文件的大小是 100MB,每个文件中存储的都是有序的字符串。 我们希望将这些 100 个小文件合并成一个有序的大文件 从这 100 个文件中,各取第一个字符串,放入数组中, 然后比较大小,把最小的那个字符串放入合并后的大文件中,并从数组中删除。 用数组这种数据结构,来存储从小文件中取出来的字符串。 每次从数组中取最小字符串,都需要循环遍历整个数组(数组大小是100) 可以用到优先级队列,也可以说是堆: 将从小文件中取出来的字符串放入到小顶堆中, 那堆顶的元素,也就是优先级队列队首的元素,就是最小的字符串。 我们将这个字符串放入到大文件中,并将其从堆中删除。 然后再从小文件中取出下一个字符串,放入到堆中。高性能定时器:
定时器中维护了很多定时任务,每个任务都设定了一个要触发执行的时间点。 每过一个很小的单位时间(比如 1 秒),就扫描一遍任务,看是否有任务到达设定的执行时间 每过 1 秒就扫描一遍任务列表的做法比较低效 用优先级队列来解决: 按照任务设定的执行时间,将这些任务存储在优先级队列中, 队列首部(也就是小顶堆的堆顶)存储的是最先执行的任务 a. 只需要看堆顶 b. 如果没有新任务,可以不用每次检查是否有任务,可以在堆顶任务需要执行时再检查
堆的应用-利用堆求 Top K¶
求 Top K 的问题抽象成两类:
一类是针对静态数据集合,也就是说数据集合事先确定,不会再变
另一类是针对动态数据集合,也就是说数据集合事先并不确定,有数据动态地加入到集合中
针对静态数据:
维护一个大小为 K 的小顶堆
顺序遍历数组,从数组中取出数据与堆顶元素比较:
如果比堆顶元素大,我们就把堆顶元素删除,并且将这个元素插入到堆中
如果比堆顶元素小,则不做处理,继续遍历数组
等数组中的数据都遍历完之后,堆中的数据就是前 K 大数据了
时间复杂度:
遍历数组需要 O(n) 的时间复杂度
一次堆化操作需要 O(logK) 的时间复杂度,
所以最坏情况下,n 个元素都入堆一次,时间复杂度就是 O(nlogK)
针对动态数据:
同「静态数据」一样先做全量操作
对增量操作:
一直都维护一个 K 大小的小顶堆
当有数据被添加到集合中时,也要与堆进行比较判断
堆的应用-利用堆求中位数¶
对于一组静态数据,中位数是固定的,我们可以先排序,第 n/2 个数据就是中位数。但是,如果我们面对的是动态数据集合,中位数在不停地变动,如果再用先排序的方法,每次询问中位数的时候,都要先进行排序,那效率就不高了。
借助堆这种数据结构实现求中位数操作:
维护两个堆,一个大顶堆,一个小顶堆
大顶堆、小顶堆各存储一半数据
小顶堆中的数据都大于大顶堆中的数据。
新添加一个数据时:
如果新加入的数据小于等于大顶堆的堆顶元素,我们就将这个新数据插入到大顶堆;
否则,我们就将这个新数据插入到小顶堆
两个堆中的数据个数不符合各一半时:
从一个堆将堆顶元素移动到另一个堆
时间复杂度:
插入数据因为需要涉及堆化,所以时间复杂度变成了 O(logn),
但是求中位数我们只需要返回大顶堆的堆顶元素就可以了,所以时间复杂度就是 O(1)
备注
利用两个堆不仅可以快速求出中位数,还可以快速求其他百分位的数据,原理是类似的。如:如何快速求接口的 99% 响应时间?
图¶
涉及图的算法:
图的搜索
最短路径
最小生成树
二分图
顶点(vertex)
边(edge)
无向图
顶点的度(degree)
有向图
入度(In-degree): 有多少条边指向这个顶点
出度(Out-degree): 有多少条边是以这个顶点为起点指向其他顶点
带权图(weighted graph)
权重(weight)
邻接矩阵-Adjacency Matrix¶
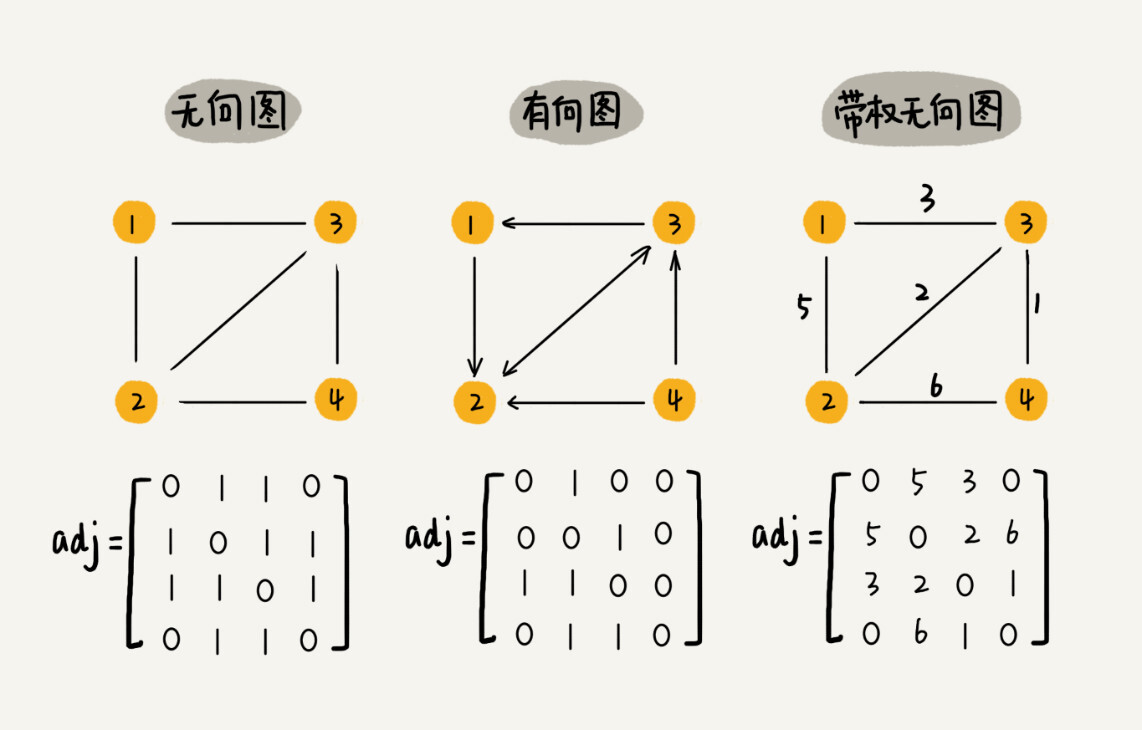
邻接矩阵-Adjacency Matrix:
对于无向图来说:
如果顶点 i 与顶点 j 之间有边,我们就将 A[i][j]和 A[j][i]标记为 1
对于有向图来说:
如果顶点 i 到顶点 j 之间,有一条箭头从顶点 i 指向顶点 j 的边,
那我们就将 A[i][j]标记为 1
对于带权图:
数组中就存储相应的权重
备注
用邻接矩阵来表示一个图,虽然简单、直观,但是比较浪费存储空间
邻接矩阵缺点:
比较浪费存储空间
特别对稀疏图-Sparse Matrix:
顶点很多,但每个顶点的边并不多,那邻接矩阵的存储方法就更加浪费空间
比如微信有好几亿的用户,对应到图上就是好几亿的顶点
但每个用户的好友并不会很多,一般也就三五百个而已
邻接矩阵优点:
1. 邻接矩阵的存储方式简单、直接
因为基于数组,所以在获取两个顶点的关系时,就非常高效
2. 方便计算
用邻接矩阵的方式存储图,可以将很多图的运算转换成矩阵之间的运算。
比如求解最短路径问题时有个Floyd-Warshall 算法,利用矩阵循环相乘若干次得到结果
邻接表-Adjacency List¶
备注
邻接表存储起来比较节省空间,但是使用起来就比较耗时间。
图-搜索算法¶
备注
大部分涉及搜索的场景都可以抽象成“图”
深度优先、广度优先搜索
A*、IDA* 等启发式搜索算法。
广度优先搜索-BFS¶
BFS: Breadth-First-Search(广度优先搜索)
深度优先搜索-DFS¶
深度优先搜索(Depth-First-Search),简称 DFS
迷宫存储问题
欧拉七桥问题
字符串匹配算法¶
单模式串匹配的算法: 一个模式串和一个主串之间进行匹配
BF 算法和 RK 算法
BM 算法和 KMP 算法
多模式串匹配算法: 在多个模式串和一个主串之间做匹配
Trie 树和 AC 自动机
BF 算法¶
Brute Force
暴力匹配算法,也叫朴素匹配算法
备注
主串的长度记作 n,模式串的长度记作 m。在主串中,检查起始位置分别是 0、1、2….n-m 且长度为 m 的 n-m+1 个子串,看有没有跟模式串匹配的
复杂度:
最坏情况时间复杂度是 O(n*m)
时间复杂度很高但还是较常用的字符串匹配算法原因:
1. 实际的软件开发中,大部分情况下,模式串和主串的长度都不会太长
2. 算法思想简单,代码实现也非常简单
RK 算法¶
Rabin-Karp 算法: 两位发明者 Rabin 和 Karp 的名字来命名
备注
借助哈希算法来实现高效字符串匹配。
RK 算法的思路是这样的:
通过哈希算法对主串中的 n-m+1 个子串分别求哈希值,
然后逐个与模式串的哈希值比较大小
如果某个子串的哈希值与模式串相等,那就说明对应的子串和模式串匹配了
(这里先不考虑哈希冲突的问题,后面我们会讲到)
因为哈希值是一个数字,数字之间比较是否相等是非常快速的,所以模式串和子串比较的效率就提高了。
备注
【小技巧】假设要匹配的字符串的字符集中只包含 K 个字符,我们可以用一个 K 进制数来表示一个子串,这个 K 进制数转化成十进制数,作为子串的哈希值。
备注
比如要处理的字符串只包含 a~z 这 26 个小写字母,那我们就用二十六进制来表示一个字符串。我们把 a~z 这 26 个字符映射到 0~25 这 26 个数字,a 就表示 0,b 就表示 1,以此类推,z 表示 25。
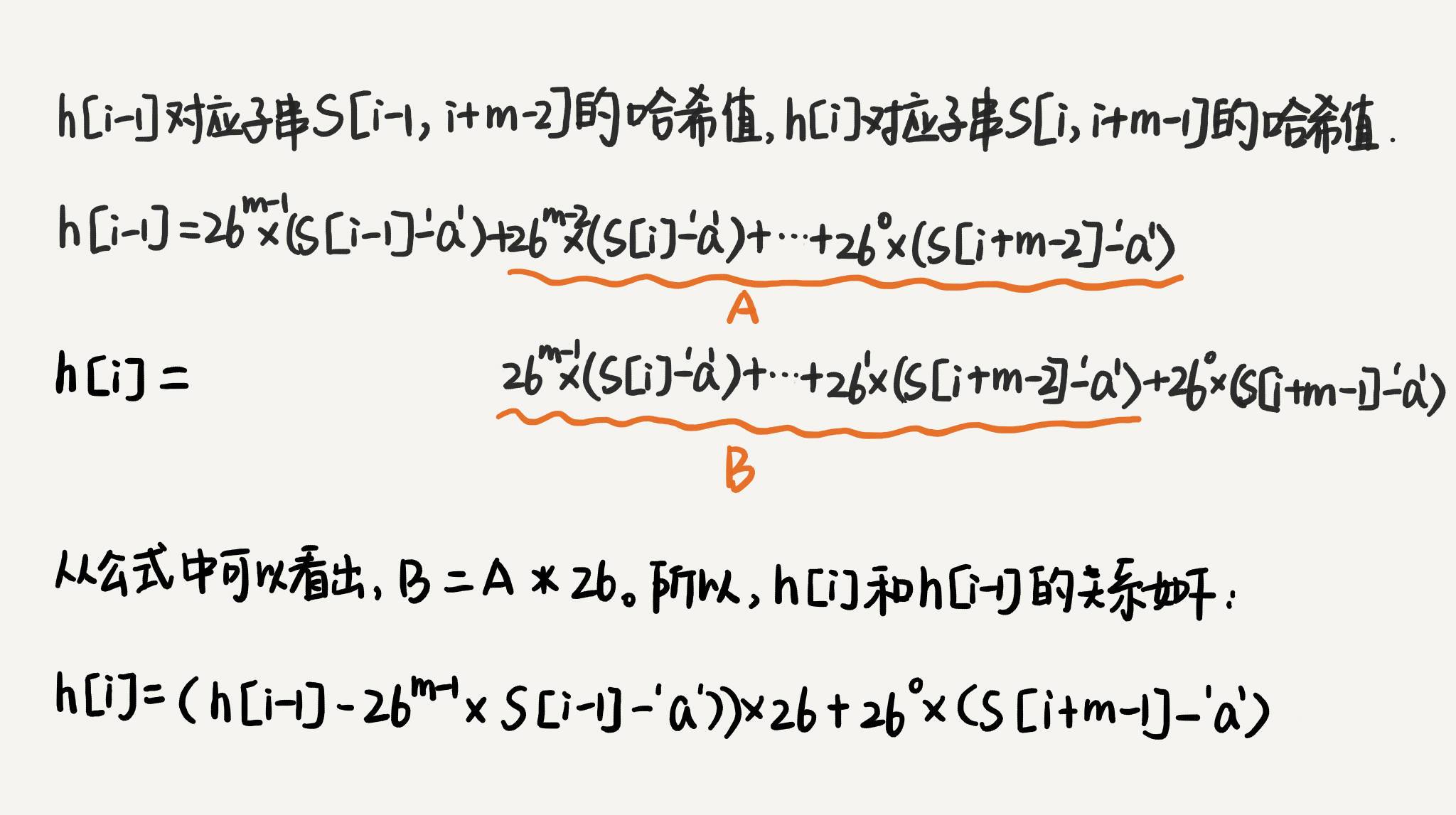
【小技巧】事先计算好 26^0、26^1、26^2……26^(m-1),并且存储在一个长度为 m 的数组中,公式中的“次方”就对应数组的下标。当我们需要计算 26 的 x 次方的时候,就可以从数组的下标为 x 的位置取值,直接使用,省去了计算的时间。¶
时间复杂度:
RK 算法包含两部分:
1. 计算子串哈希值
只需要扫描一遍主串就能计算出所有子串的哈希值了,所以这部分的时间复杂度是 O(n)
2. 模式串哈希值与子串哈希值之间的比较
模式串哈希值与每个子串哈希值之间的比较的时间复杂度是 O(1),
总共需要比较 n-m+1 个子串的哈希值,所以,这部分的时间复杂度也是 O(n)
备注
上面设计的哈希算法是没有散列冲突的。但还有一个问题就是,模式串很长,相应的主串中的子串也会很长,通过上面的哈希算法计算得到的哈希值就可能很大,如果超过了计算机中整型数据可以表示的范围
哈希算法的其他设计方法:
1. 把字符串中每个字母对应的数字相加
假设字符串中只包含 a~z 这 26 个英文字母,
那我们每个字母对应一个数字,比如 a 对应 1,b 对应 2,以此类推,z 对应 26。
我们可以把字符串中每个字母对应的数字相加,最后得到的和作为哈希值
这种哈希算法的哈希冲突概率也是挺高的
2. 每一个字母从小到大对应一个素数:
而不是 1,2,3……这样的自然数,
这样冲突的概率就会降低一些
哈希算法的冲突解决:
当我们发现一个子串的哈希值跟模式串的哈希值相等的时候,
我们只需要再对比一下子串和模式串本身就好了
BM 算法¶
BM(Boyer-Moore)算法
性能是著名的 KMP 算法的 3 到 4 倍
BM 算法的原理很复杂,比较难懂,学起来会比较烧脑
BM 算法包含两部分:
1. 坏字符规则(bad character rule)
2. 好后缀规则(good suffix shift)
KMP 算法¶
KMP 算法是根据三位作者(D.E.Knuth,J.H.Morris 和 V.R.Pratt)的名字来命名的
全称是 Knuth Morris Pratt 算法
KMP 算法的核心思想:
假设主串是 a,模式串是 b。
在模式串与主串匹配的过程中,当遇到不可匹配的字符的时候,我们希望找到一些规律,
可以将模式串往后多滑动几位,跳过那些肯定不会匹配的情况。
坏字符
好前缀
Trie 树¶
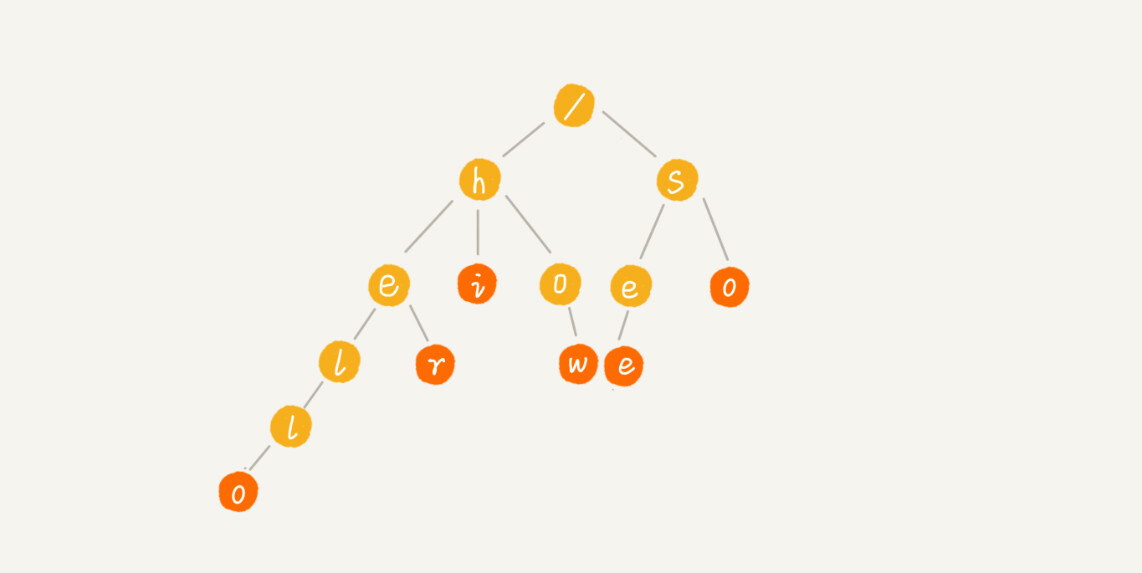
Trie 树,也叫“字典树”
备注
Trie 树的本质,就是利用字符串之间的公共前缀,将重复的前缀合并在一起
Trie 树主要有两个操作:
1. 将字符串集合构造成 Trie 树
这个过程分解开来的话,就是一个将字符串插入到 Trie 树的过程
2. 在 Trie 树中查询一个字符串
时间复杂度:
构建 Trie 树的过程,需要扫描所有的字符串,
时间复杂度是 O(n)(n 表示所有字符串的长度和)
查找字符串的时间复杂度是 O(k),k 表示要查找的字符串的长度
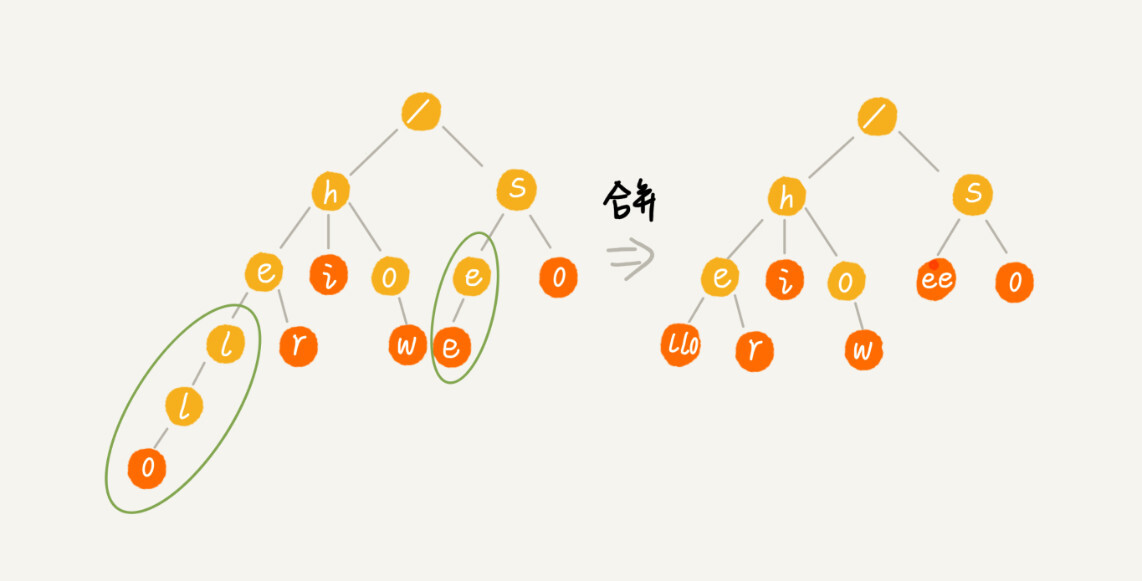
Trie 树的变体有很多,都可以在一定程度上解决内存消耗的问题。比如,缩点优化,就是对只有一个子节点的节点,而且此节点不是一个串的结束节点,可以将此节点与子节点合并。¶
Trie 树适合的场景:
1. 字符串中包含的字符集不能太大
如果字符集太大,那存储空间可能就会浪费很多。
即便可以优化,但也要付出牺牲查询、插入效率的代价。
2. 字符串的前缀重合比较多
3. 指针串起来的数据块是不连续的
Trie 树中用到了指针,所以,对缓存并不友好,性能上会打个折扣。
场景举例:
1. 搜索引擎的搜索关键词提示功能
2. 自动输入补全,比如:
输入法自动补全功能、IDE 代码编辑器自动补全功能、浏览器网址输入的自动补全功能
更多思考:
DAT(双数组trie树)
后缀树
AC自动机¶
AC 自动机算法,全称是 Aho-Corasick 算法
AC 自动机是基于 Trie 树的一种改进算法
Trie 树跟 AC 自动机之间的关系,就像单串匹配中朴素的串匹配算法,跟 KMP 算法之间的关系一样
备注
AC 自动机实际上就是在 Trie 树之上,加了类似 KMP 的 next 数组,只不过此处的 next 数组是构建在树上罢了
AC 自动机算法包含两个部分:
1. 将多个模式串构建成 AC 自动机
a. 将模式串构建成 Trie 树
b. 在 Trie 树上构建失败指针
2. 在 AC 自动机中匹配主串
各类数据结构对比¶
散列表:插入删除查找都是O(1), 是最常用的,但其缺点是不能顺序遍历以及扩容缩容的性能损耗。适用于那些不需要顺序遍历,数据更新不那么频繁的。
跳表:插入删除查找都是O(logn), 并且能顺序遍历。缺点是空间复杂度O(n)。适用于不那么在意内存空间的,其顺序遍历和区间查找非常方便。
红黑树:插入删除查找都是O(logn), 中序遍历即是顺序遍历,稳定。缺点是难以实现,去查找不方便。其实跳表更佳,但红黑树已经用于很多地方了。
贪心算法-greedy algorithm¶
经典的应用:
霍夫曼编码(Huffman Coding)
Prim 和 Kruskal 最小生成树算法
Dijkstra 单源最短路径算法
贪心算法解决问题的步骤:
1. 定义了限制值和期望值: 希望从中选出几个数据,在满足限制值的情况下,期望值最大
2. 每次选择: 在当前情况下,在对限制值同等贡献量的情况下,对期望值贡献最大的数据
3. 从实践的角度来说,大部分能用贪心算法解决的问题
贪心算法的正确性都是显而易见的,也不需要严格的数学推导证明
有权图中,我们从顶点 S 开始,找一条到顶点 T 的最短路径:
用贪心的选择方式,最终求的路径并不是最短路径
主要原因是:
前面的选择,会影响后面的选择。
即便我们第一步选择最优的走法(边最短),
但可能因为这一步选择,导致后面每一步的选择都很糟糕,最终也就无缘全局最优解
实例-分糖果:
有 m 个糖果和 n 个孩子。我们现在要把糖果分给这些孩子吃 但是糖果少,孩子多(m<n),所以糖果只能分配给一部分孩子 每个糖果的大小不等,这 m 个糖果的大小分别是 s1,s2,s3,……,sm 每个孩子对糖果大小的需求也不一样: 分别是 g1,g2,g3,……,gn 只有糖果的大小大于等于孩子的对糖果大小的需求的时候,孩子才得到满足 提问: 如何分配糖果,能尽可能满足最多数量的孩子?
实例-钱币找零:
假设我们有 1 元、2 元、5 元、10 元、20 元、50 元、100 元这些面额的纸币, 它们的张数分别是 c1、c2、c5、c10、c20、c50、c100。 提问: 现在要用这些钱来支付 K 元,最少要用多少张纸币呢
实例-区间覆盖:
假设我们有 n 个区间, 区间的起始端点和结束端点分别是[l1, r1],[l2, r2],[l3, r3],……,[ln, rn] 我们从这 n 个区间中选出一部分区间,这部分区间满足两两不相交(端点相交的情况不算相交) 提问: 最多能选出多少个区间呢 这个处理思想在很多贪心算法问题中都有用到,比如任务调度、教师排课等 解决思路: 我们假设这 n 个区间中最左端点是 lmin,最右端点是 rmax 这个问题就相当于,我们选择几个不相交的区间,从左到右将[lmin, rmax]覆盖上 我们按照起始端点从小到大的顺序对这 n 个区间排序 每次选择的时候: 左端点跟前面的已经覆盖的区间不重合的,右端点又尽量小的, 这样可以让剩下的未覆盖区间尽可能的大,就可以放置更多的区间
霍夫曼编码¶
用贪心算法实现霍夫曼编码:
霍夫曼编码是十分有效的编码方法,广泛用于数据压缩中,其压缩率在 20%~90% 之间
不仅会考察文本中有多少个不同字符,还考察每个字符出现的频率,根据频率的不同,选择不同长度的编码
备注
假设我有一个包含 1000 个字符的文件,每个字符占 1 个 byte(1byte=8bits),存储这 1000 个字符就一共需要 8000bits,那有没有更加节省空间的存储方式呢?
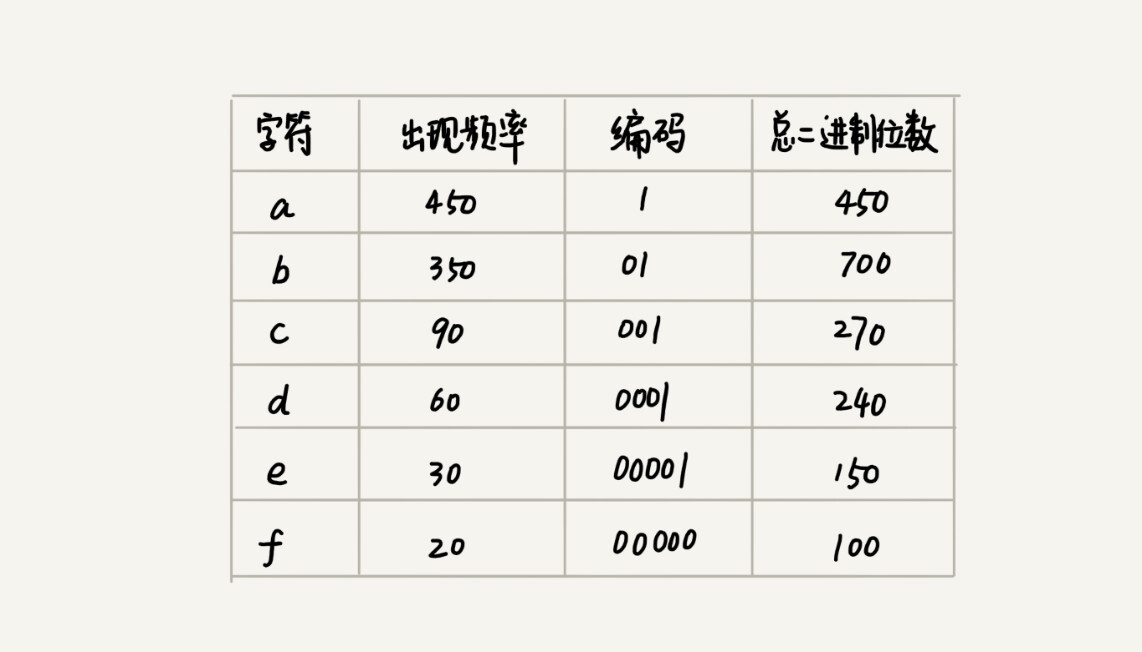
假设这 6 个字符出现的频率从高到低依次是 a、b、c、d、e、f。看本图的「编码」列,任何一个字符的编码都不是另一个的前缀,在解压缩的时候,我们每次会读取尽可能长的可解压的二进制串,所以在解压缩的时候也不会歧义。经过这种编码压缩之后,这 1000 个字符只需要 2100bits 就可以了¶
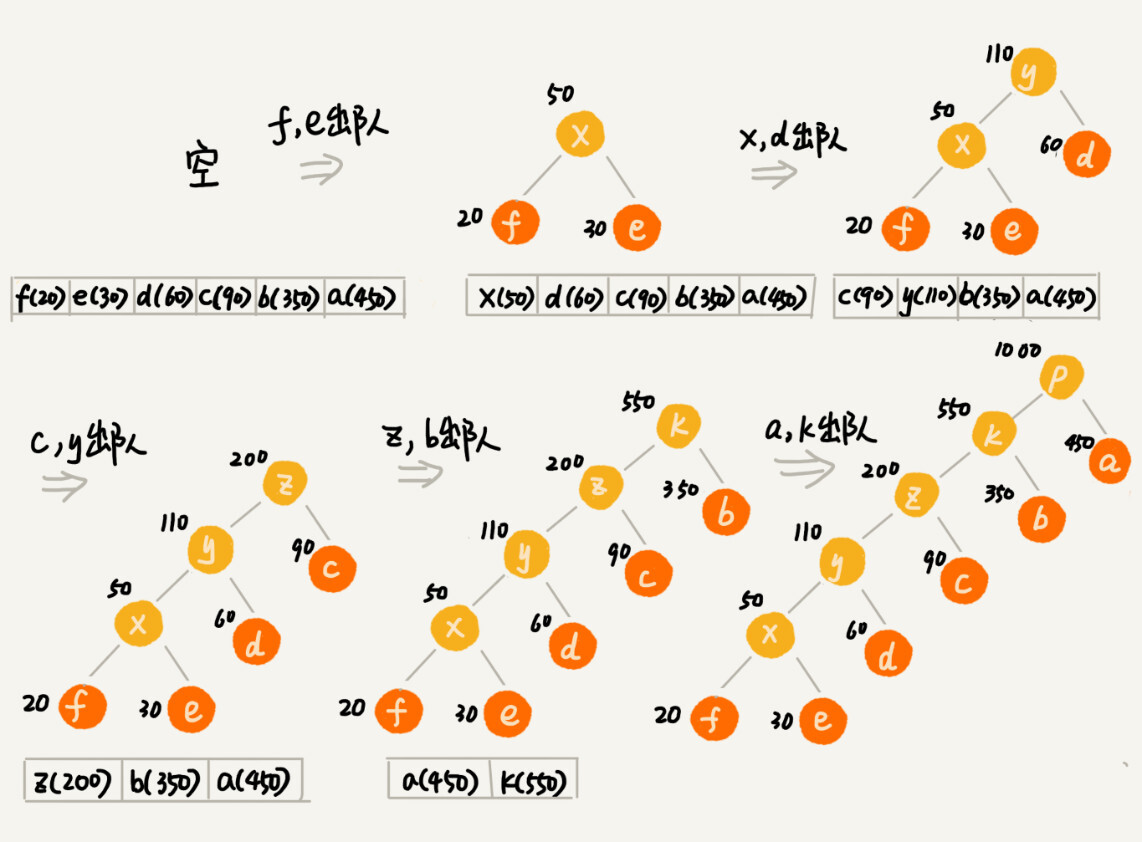
把每个字符看作一个节点,并且附带着把频率放到优先级队列中。我们从队列中取出频率最小的两个节点 A、B,然后新建一个节点 C,把频率设置为两个节点的频率之和,并把这个新节点 C 作为节点 A、B 的父节点。最后再把 C 节点放入到优先级队列中。重复这个过程,直到队列中没有数据。¶
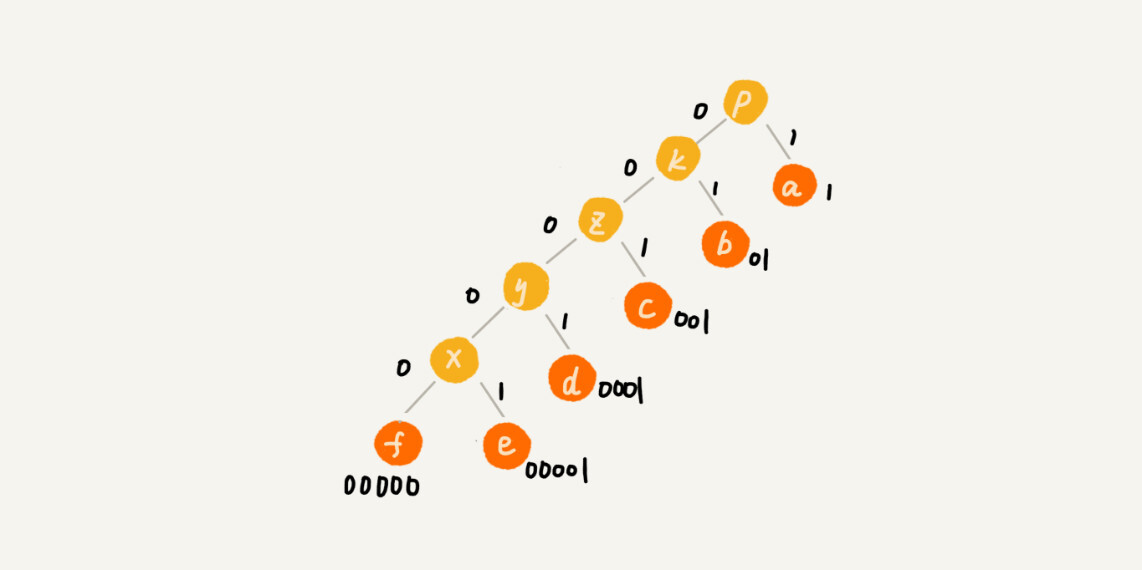
我们给每一条边加上画一个权值,指向左子节点的边我们统统标记为 0,指向右子节点的边,我们统统标记为 1,那从根节点到叶节点的路径就是叶节点对应字符的霍夫曼编码。¶
备注
贪心算法的最难的一块是如何将要解决的问题抽象成贪心算法模型
分治算法¶
divide and conquer
MapReduce
倒排索引
PageRank 计算
网页分析等搜索引擎相关的技术
核心思想:
本质就是四个字,分而治之
也就是将原问题划分成 n 个规模较小,并且结构与原问题相似的子问题,
递归地解决这些子问题,然后再合并其结果,就得到原问题的解。
备注
分治算法是一种处理问题的思想,递归是一种编程技巧
分治算法能解决的问题,一般需要满足下面这几个条件:
1. 原问题与分解成的小问题具有相同的模式
2. 原问题分解成的子问题可以独立求解,子问题之间没有相关性
这一点是分治算法跟动态规划的明显区别
3. 具有分解终止条件,也就是说,当问题足够小时,可以直接求解
4. 可以将子问题合并成原问题,而这个合并操作的复杂度不能太高
否则就起不到减小算法总体复杂度的效果了
leetcode 315
回溯算法¶
应用:
深度优先搜索算法
正则表达式匹配
编译原理中的语法分析
经典的数学问题:
数独
八皇后
0-1 背包
图的着色
旅行商问题
全排列
备注
回溯算法非常适合用递归来实现,在实现的过程中,剪枝操作是提高回溯效率的一种技巧。利用剪枝,我们并不需要穷举搜索所有的情况,从而提高搜索效率。本质就是『暴力枚举』
动态规划-Dynamic Programming¶
备注
动态规划比较适合用来求解最优问题,比如求最大值、最小值等等。它可以非常显著地降低时间复杂度,提高代码的执行效率。不过,它也是出了名的难学。
备注
[动态规划名字的由来]我们把问题分解为多个阶段,每个阶段对应一个决策。我们记录每一个阶段可达的状态集合(去掉重复的),然后通过当前阶段的状态集合,来推导下一个阶段的状态集合,动态地往前推进。
备注
大部分动态规划能解决的问题,都可以通过回溯算法来解决,只不过回溯算法解决起来效率比较低,时间复杂度是指数级的。动态规划算法,在执行效率方面,要高很多。尽管执行效率提高了,但是动态规划的空间复杂度也提高了,所以,很多时候,我们会说,动态规划是一种空间换时间的算法思想。
一个模型三个特征:
多阶段决策最优解模型
解决最优问题的过程,需要经历多个决策阶段。
每个决策阶段都对应着一组状态。
然后我们寻找一组决策序列,经过这组决策序列,能够产生最终期望求解的最优值。
1. 最优子结构
问题的最优解包含子问题的最优解。
反过来说就是,我们可以通过子问题的最优解,推导出问题的最优解。
如果我们把最优子结构,对应到我们前面定义的动态规划问题模型上,
那我们也可以理解为,后面阶段的状态可以通过前面阶段的状态推导出来。
2. 无后效性
无后效性有两层含义:
第一层含义是,在推导后面阶段的状态的时候,
我们只关心前面阶段的状态值,不关心这个状态是怎么一步一步推导出来的。
第二层含义是,某阶段状态一旦确定,就不受之后阶段的决策影响。
无后效性是一个非常“宽松”的要求。
只要满足前面提到的动态规划问题模型,其实基本上都会满足无后效性。
3. 重复子问题
不同的决策序列,到达某个相同的阶段时,可能会产生重复的状态。
解决动态规划问题的两种思路:
1. 状态转移表法
步骤:
- 回溯算法实现: 一般能用动态规划解决的问题,都可以使用回溯算法的暴力搜索解决
- 定义状态: 每个状态表示一个节点
- 画递归树: 然后对应画出递归树
- 找重复子问题: 从递归树中,能看出来,重复子问题是否存在,以及是如何产生的
- 画状态转移表: 状态表一般是二维的,把它想象成二维数组。每个状态含三个变量,行、列、数组值
- 根据递推关系填表: 根据决策先后过程,从前往后,根据递推关系,分阶段填充状态表中的每个状态
- 将填表过程翻译成代码
找到重复子问题后有两种处理思路:
a. 直接用 **回溯加“备忘录”** 的方法,来避免重复子问题
b. 使用 **动态规划的解决方法,状态转移表法**
2. 状态转移方程法
说明:
如果问题的状态比较复杂,需要很多变量来表示,那对应的状态表可能就是高维的(三维、四信维)
不适合用状态转移表法来解决: a. 图不好画 b. 不好理解
步骤:
- 找最优子结构: 分析某个问题如何通过子问题来递归求解
- 写状态转移方程: 根据最优子结构,写出递归公式,也就是所谓的状态转移方程
- 将状态转移方程翻译成代码
有两种代码实现方法:
一种是递归加“备忘录”
另一种是迭代递推
编辑距离-Edit Distance:
将一个字符串转化成另一个字符串,需要的最少编辑操作次数(如增加、删除、替换一个字符) 编辑距离越大,说明两个字符串的相似程度越小; 相反,编辑距离就越小,说明两个字符串的相似程度越大。 对于两个完全相同的字符串来说,编辑距离就是 0。 莱文斯坦距离(Levenshtein distance) 允许增加、删除、替换字符这三个编辑操作 莱文斯坦距离的大小,表示两个字符串差异的大小 最长公共子串长度(Longest common substring length) 只允许增加、删除字符这两个编辑操作 最长公共子串的大小,表示两个字符串相似程度的大小
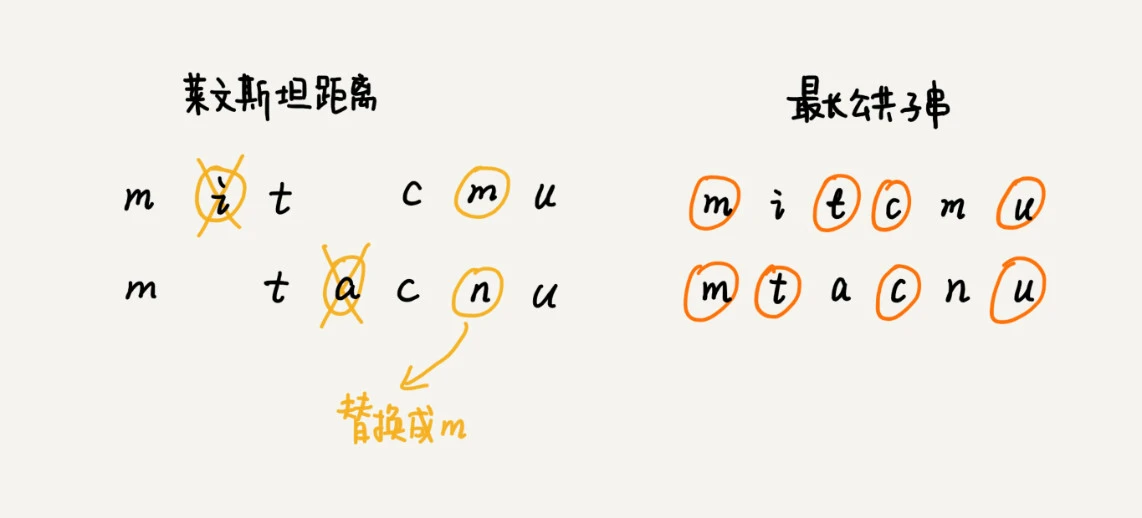
两个字符串 mitcmu 和 mtacnu 的莱文斯坦距离是 3,最长公共子串长度是 4¶
拓扑排序¶
Topologically sort
拓扑排序是一种用于有向无环图(DAG)中的排序算法。
它的目的是将图中的所有节点排成一个线性序列,使得对于每一条有向边
u→v,节点 u 在节点 v 之前出现。拓扑排序通常用于处理任务调度、课程安排等需要满足某种依赖关系的场景。
拓扑排序有两种实现方法:
1. Kahn 算法
实际上用的是贪心算法思想,思路非常简单、好懂:
顶点入度为 0: 没有任何顶点必须先于这个顶点执行
步骤:
a. 先从图中,找出一个入度为 0 的顶点,将其输出到拓扑排序的结果序列中
b. 把这个顶点从图中删除(也就是把这个顶点可达的顶点的入度都减 1)
c. 循环执行上面的过程,直到所有的顶点都被输出
最后输出的序列,就是满足局部依赖关系的拓扑排序
时间复杂度:
O (V+E)(V 表示顶点个数,E 表示边的个数)
2. DFS 深度优先搜索算法
深度优先遍历,遍历图中的所有顶点,而非只是搜索一个顶点到另一个顶点的路径
a. 通过邻接表构造逆邻接表
邻接表中,边 s->t 表示 s 先于 t 执行,也就是 t 要依赖 s。
在逆邻接表中,边 s->t 表示 s 依赖于 t,s 后于 t 执行
b. 算法的核心,也就是递归处理每个顶点
对于顶点 vertex 来说,我们先输出它可达的所有顶点,
也就是说,先把它依赖的所有的顶点输出了,然后再输出自己
时间复杂度也是 O (V+E)
备注
凡是需要通过局部顺序来推导全局顺序的,一般都能用拓扑排序来解决。
除此之外,拓扑排序还能检测图中环的存在:
对于 Kahn 算法来说,如果最后输出出来的顶点个数,少于图中顶点个数,
图中还有入度不是 0 的顶点,那就说明,图中存在环。
环的检测问题并不需要动用复杂的拓扑排序算法:
而只需要记录已经访问过的用户 ID,当用户 ID 第二次被访问的时候,就说明存在环
示例:
# 简单的有向无环图:
5 → 0 ← 4
↑ ↓
2 1 → 3
# 这个图的拓扑排序可能是以下几种之一:
4, 5, 2, 0, 1, 3
4, 2, 5, 0, 1, 3
5, 2, 4, 0, 1, 3
关键特点:
有向无环图:拓扑排序只能应用于有向无环图(DAG),即图中不存在任何环路。
线性序列:排序结果是图中所有节点的一个线性排列,满足每个节点的所有前置节点都排在它之前。
依赖关系:拓扑排序确保在满足依赖关系的前提下,尽可能早地安排每个节点。
最短路径算法-Shortest Path Algorithm¶
针对有权图,也就是图中的每条边都有一个权重
最短路径算法:
Dijkstra 算法
Bellford 算法
Floyd 算法
单源最短路径算法(一个顶点到一个顶点)的Dijkstra 算法的核心逻辑:
我们用 vertexes 数组,记录从起始顶点到每个顶点的距离(dist)。
起初,我们把所有顶点的 dist 都初始化为无穷大(也就是代码中的 Integer.MAX_VALUE)。
我们把起始顶点的 dist 值初始化为 0,然后将其放到优先级队列中。
我们从优先级队列中取出 dist 最小的顶点 minVertex,
然后考察这个顶点可达的所有顶点(代码中的 nextVertex)。
如果 minVertex 的 dist 值加上 minVertex 与 nextVertex 之间边的权重 w 小于 nextVertex 当前的 dist 值,
也就是说,存在另一条更短的路径,它经过 minVertex 到达 nextVertex。
那我们就把 nextVertex 的 dist 更新为 minVertex 的 dist 值加上 w。
然后,我们把 nextVertex 加入到优先级队列中。
重复这个过程,直到找到终止顶点 t 或者队列为空。
时间复杂度就是 O (E*logV)
备注
对于软件开发工程师来说,我们经常要根据问题的实际背景,对解决方案权衡取舍。类似出行路线这种工程上的问题,我们没有必要非得求出个绝对最优解。很多时候,为了兼顾执行效率,我们只需要计算出一个可行的次优解就可以了。
位图-bitmap¶
布隆过滤器(Bloom Filter): 基于位图,是对位图的一种改进
布尔类型,一般大小 1 字节的。实际上,表示 true 和 false 两个值,我们只需要用一个二进制位(bit)就可以了
我们有 1 千万个整数,整数的范围在 1 到 1 亿之间。如何快速查找某个整数是否在这 1 千万个整数中呢?如果用散列表存储这 1 千万的数据,数据是 32 位的整型数,也就是需要 4 个字节的存储空间,那总共至少需要 40MB 的存储空间。如果我们通过位图的话,数字范围在 1 到 1 亿之间,只需要 1 亿个二进制位,也就是 12MB 左右的存储空间就够了。
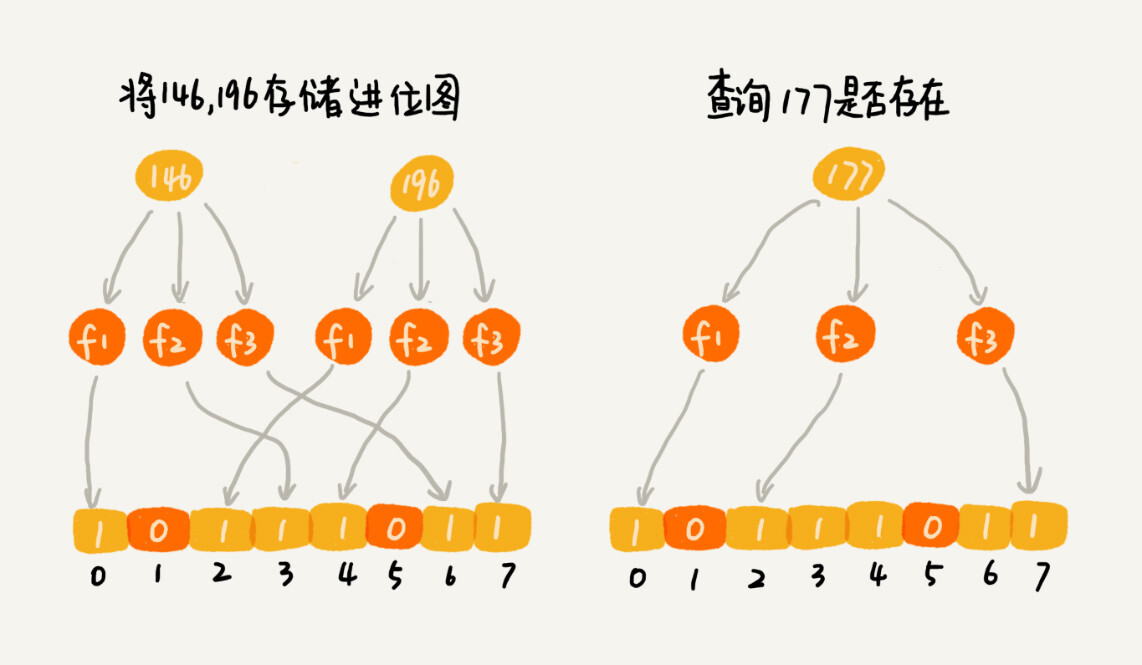
哈希函数会存在冲突的问题,为了降低这种冲突概率,当然我们可以设计一个复杂点:
K 个哈希函数,对同一个数字进行求哈希值,那会得到 K 个不同的哈希值,
我们分别记作 X1, X2, ... Xk
我们把这 K 个数字作为位图中的下标,
将对应的 BitMap[X1],BitMap[X2]...BitMap[Xk]都设置成 true
即用 K 个二进制位,来表示一个数字的存在
要查询某个数字是否存在的时候:
我们用同样的 K 个哈希函数,对这个数字求哈希值,分别得到 Y1, Y2, ... Yk
这 K 个哈希值,如果都是 true,则说明,这个数字存在,
如果有其中任意一个不为 true,那就说明这个数字不存在。
备注
布隆过滤器的误判有一个特点,那就是,它只会对存在的情况有误判。如果某个数字经过布隆过滤器判断不存在,那说明这个数字真的不存在,不会发生误判;如果某个数字经过布隆过滤器判断存在,这个时候才会有可能误判,有可能并不存在。不过,只要我们调整哈希函数的个数、位图大小跟要存储数字的个数之间的比例,那就可以将这种误判的概率降到非常低。
使用场景:
爬虫: 用于记录已经爬取过的页面
一个没有被爬取过的网页,被误判为已经被爬取,对于搜索引擎来说,也并不是什么大事情
是可以容忍的,毕竟网页太多了,搜索引擎也不可能 100% 都爬取到
手机号黑名单: 骚扰电话号码和垃圾短信发送号码
每个号码看作一个字符串,并且假设平均长度是 16 个字节
存储 50 万个电话号码:
使用散列表、二叉树等动态数据结构来存储: 大约需要 10MB 的内存空间
要存储 500 万个手机号码:
使用布隆过滤器存储:
我们把位图大小设置为 10 倍数据大小,也就是 5000 万,
需要使用 5000 万个二进制位(5000 万 bits),换算成字节,也就是不到 7MB 的存储空间
不过:
布隆过滤器会有判错的概率!
如果它把一个重要的电话或者短信,当成垃圾短信或者骚扰电话拦截了,
对于用户来说,这是无法接受的
应用:
Java 中的 BitSet 类就是一个位图
Redis 也提供了 BitMap 位图类
Google 的 Guava 工具包
概率统计¶
备注
贝叶斯分类是一类分类算法的总称,这类算法均以贝叶斯定理为基础,故统称为贝叶斯分类。而朴素朴素贝叶斯分类是贝叶斯分类中最简单,也是常见的一种分类方法。
朴素贝叶斯算法:
P(A|B) = [P(B|A)]*P(A)]/P(B)
P(A|B): 在事件B 发生的前提下,事件 A 发生的概率
P(B|A): 在事件A 发生的前提下,事件 B 发生的概率
P(A): 事件 A 发生的概率
P(B): 事件 B 发生的概率
实例-垃圾短信:
P(是垃圾短信|W1,W2...Wn 同时出现在短信中)=X/Y
其中:
X= P(W1,W2...Wn 同时出现在短信中|是垃圾短信) * P(短信是垃圾短信)
Y = P(W1,W2...Wn 同时出现在短信中)
而:
P(W1,W2...Wn 同时出现在短信中|是垃圾短信)=
P(W1出现在短信中|是垃圾短信) *
P(W2出现在短信中|是垃圾短信) *
...
P(Wn出现在短信中|是垃圾短信) *
P(W1,W2...Wn 同时出现在短信中)
P(W1出现在短信中) *
P(W2出现在短信中) *
...
P(Wn出现在短信中) *
向量空间¶
歌曲推荐系统的核心思想:
找到跟你口味偏好相似的用户,把他们爱听的歌曲推荐给你
找出跟你喜爱的歌曲特征相似的歌曲,把这些歌曲推荐给你
通过用户的行为,来定义这个喜爱程度。我们给每个行为定义一个得分:
1. 跳过: -1
2. 没听过: 0
3. 听完: 1
4. 搜索: 2
5. 收藏: 3
6. 分享: 4
7. 单曲循环: 5
欧几里得距离-Euclidean distance:
用来计算两个向量之间的距离的
曼哈顿距离-Manhattan distance:
欧几里得距离的计算公式,会涉及比较耗时的开根号计算
曼哈顿距离是两点之间横纵坐标的距离之和。
计算的过程只涉及加减法、符号位反转,所以比欧几里得距离更加高效。
Math.abs(v1.x - v2.x) + Math.abs(v1.y - v2.y);
算法解析¶
解决问题的前提是定义清楚问题:
除了对问题进行详细的调研, 还有就是,通过对一些模糊的需求进行假设,来限定要解决的问题的范围 如: 限定在时间和空间两方面,也就是执行效率和存储空间 在执行效率方面,我们希望通过索引,查询数据的效率尽可能地高; 在存储空间方面,我们希望索引不要消耗太多的内存空间。尝试用学过的数据结构解决这个问题:
尝试用: 散列表、二叉树、跳表解决这个问题 B+树和跳表很像,但是通过二叉树演进过来的
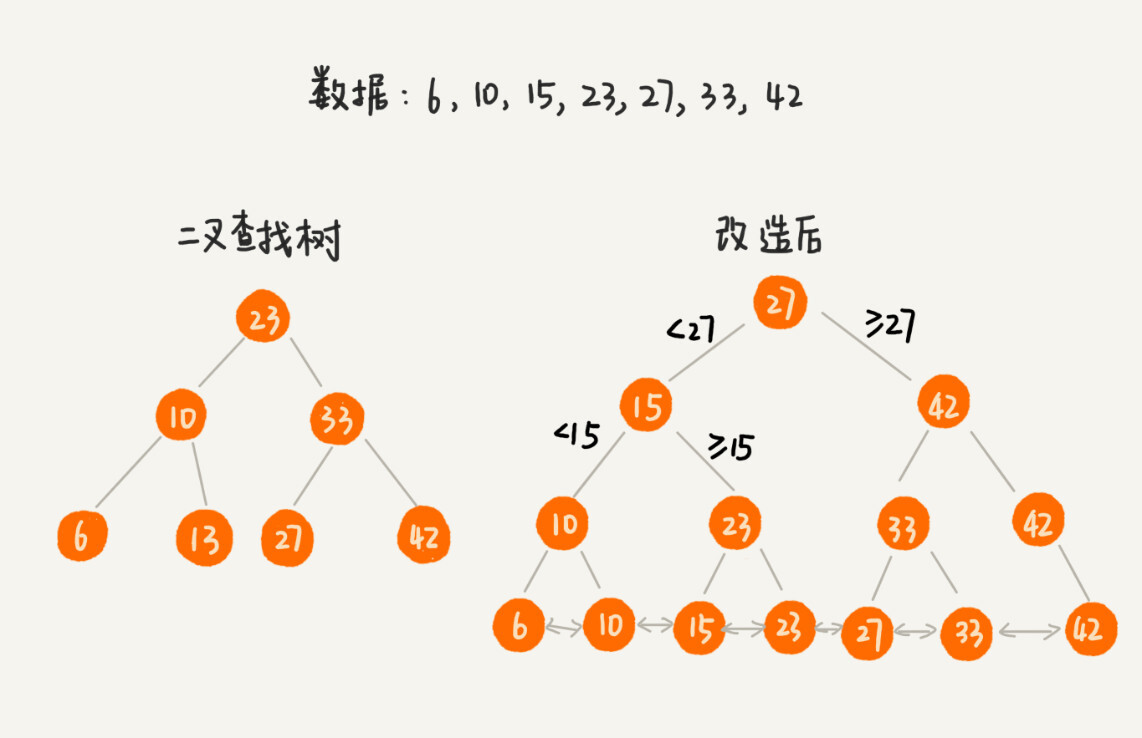
改造二叉查找树来解决这个问题:
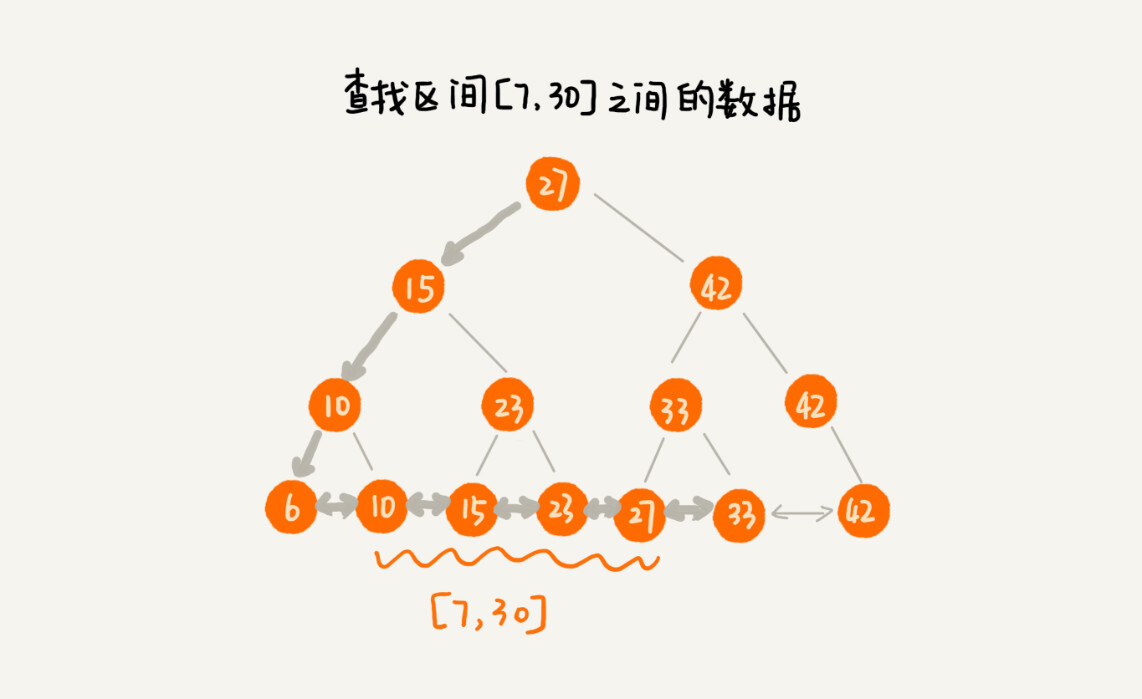
树中的节点并不存储数据本身,而是只是作为索引 把每个叶子节点串在一条链表上,链表中的数据是从小到大有序的 区间查询: 用区间的起始值,在树中进行查找,当查找到某个叶子节点之后, 我们再顺着链表往后遍历,直到链表中的结点数据值大于区间的终止值为止。 所有遍历到的数据,就是符合区间值的所有数据。
B+树¶
把二叉树改造成 B+树¶
区间查询¶
把索引放内存占用的内存会非常多:
给一亿个数据构建二叉查找树索引,那索引中会包含大约 1 亿个节点,
每个节点假设占用 16 个字节,那就需要大约 1GB 的内存空间
给一张表建立索引,我们需要 1GB 的内存空间。如果我们要给 10 张表建立索引
借助时间换空间的思路,把索引存储在硬盘中,而非内存中。
但硬盘是一个非常慢速的存储设备。
通常内存的访问速度是纳秒级别的,而磁盘访问的速度是毫秒级别的。
读取同样大小的数据,从磁盘中读取花费的时间,是从内存中读取所花费时间的上万倍,甚至几十万倍。
每个节点的读取(或者访问),都对应一次磁盘 IO 操作。
树的高度就等于每次查询数据时磁盘 IO 操作的次数。
优化的重点就是尽量减少磁盘 IO 操作,也就是,尽量降低树的高度
把索引构建成 m 叉树,高度就比二叉树要小
如果 m 叉树中的 m 是 100
那对一亿个数据构建索引,树的高度也只是 3,最多只要 3 次磁盘 IO 就能获取到数据
磁盘 IO 变少了,查找数据的效率也就提高了
备注
我们在选择 m 大小的时候,要尽量让每个节点的大小等于一个页的大小。读取一个节点,只需要一次磁盘 IO 操作。
B+ 树的特点:
1. 每个节点中子节点的个数不能超过 m,也不能小于 m/2
2. 根节点的子节点个数可以不超过 m/2,这是一个例外
3. m 叉树只存储索引,并不真正存储数据,这个有点儿类似跳表
4. 通过链表将叶子节点串联在一起,这样可以方便按区间查找
5. 一般情况,根节点会被存储在内存中,其他节点存储在磁盘中
备注
除了 B+ 树,你可能还听说过 B 树、B- 树。B- 树就是 B 树,英文翻译都是 B-Tree,这里的“-”并不是相对 B+ 树中的“+”,而只是一个连接符,这个很容易误解。B 树实际上是低级版的 B+ 树,或者说 B+ 树是 B 树的改进版。
B 树跟 B+ 树的不同点主要集中在这几个地方:
1. B+ 树中的节点不存储数据,只是索引,而 B 树中的节点存储数据
2. B 树中的叶子节点并不需要链表来串联
也就是说,B 树只是一个每个节点的子节点个数不能小于 m/2 的 m 叉树
理解B+tree的几个要点:
1. 理解二叉查找树
2. 理解二叉查找树会出现不平衡的问题(红黑树理解了,对于平衡性这个关键点就理解了)
3. 磁盘IO访问太耗时
4. 当然,链表知识跑不了 —— 别小瞧这个简单的数据结构,它是链式结构之母
5. 最后,要知道典型的应用场景:数据库的索引结构的设计
A* 算法¶
A* 算法是对 Dijkstra 算法的优化和改造
Dijkstra 算法有点儿类似 BFS 算法
A* 算法属于一种启发式搜索算法(Heuristically Search Algorithm):
其他启发式搜索算法: 1. IDA* 算法 2. 蚁群算法 3. 遗传算法 4. 模拟退火算法
启发函数-heuristic function
估价函数-evaluation function
A* 算法跟 Dijkstra 算法主要有 3 点区别:
1. 优先级队列构建的方式不同。
A* 算法是根据 f 值( f (i)=g (i)+h (i))来构建优先级队列,
而 Dijkstra 算法是根据 dist 值(也就是 g (i))来构建优先级队列;
2. A* 算法在更新顶点 dist 值的时候,会同步更新 f 值;
3. 循环结束的条件也不一样。
Dijkstra 算法是在终点出队列的时候才结束,A* 算法是一旦遍历到终点就结束。
备注
A* 算法利用贪心算法的思路,每次都找 f 值最小的顶点出队列,一旦搜索到终点就不在继续考察其他顶点和路线了。所以,它并没有考察所有的路线,也就不可能找出最短路径了。
索引¶
实际的软件开发的本质都可以抽象为 “对数据的存储和计算”:
对应到数据结构和算法中:
1. “存储” 需要的就是数据结构
2. “计算” 需要的就是算法
对于存储的需求:
功能上无外乎增删改查,这其实并不复杂。
但是,一旦存储的数据很多,那性能就成了这些系统要关注的重点
如何节省存储空间、如何提高数据增删改查的执行效率,这样的问题就成了设计的重点
索引就是关键: 索引设计得好坏,直接决定了这些系统是否优秀
功能性需求:
a. 数据是格式化数据还是非格式化数据: 结构化数据,比如,MySQL 中的数据; 非结构化数据,比如搜索引擎中网页。 对于非结构化数据,我们一般需要做预处理,提取出查询关键词,对关键词构建索引。 b. 数据是静态数据还是动态数据: 静态数据: 不会有数据的增加、删除、更新操作, 在构建索引的时候,只需要考虑查询效率就可以了 动态数据: 不仅要考虑到索引的查询效率,在原始数据更新的同时,我们还需要动态地更新索引。 支持动态数据集合的索引,设计起来相对也要更加复杂些 c. 索引存储在内存还是硬盘 存储在内存中: 那查询的速度肯定要比存储在磁盘中的高。 但原始数据量很大的情况下,对应的索引可能也会很大。 这个时候,因为内存有限,我们可能就不得不将索引存储在磁盘中了。 第三种情况,那就是一部分存储在内存,一部分存储在磁盘 这样就可以兼顾内存消耗和查询效率。 d. 单值查找还是区间查找 单值查找: 就是根据查询关键词等于某个值的数据。 区间查找: 就是查找关键词处于某个区间值的所有数据。 e. 单关键词查找还是多关键词组合查找 单关键词的查找: 比如 “数据结构” 对于单关键词的查找,索引构建起来相对简单些。 组合关键词查找,比如 “数据结构 AND 算法”。 对于多关键词查询来说,要分多种情况。 像 MySQL 这种结构化数据的查询需求,我们可以实现针对多个关键词的组合,建立索引; 像搜索引擎这样的非结构数据的查询需求,我们可以针对单个关键词构建索引, 然后通过集合操作,比如求并集、求交集等,计算出多个关键词组合的查询结果。非功能性需求:
a. 不管是存储在内存中还是磁盘中,索引对存储空间的消耗不能过大 b. 在考虑索引查询效率的同时,我们还要考虑索引的维护成本
常用来构建索引的数据结构:
静态数据构建索引:
有序数组:
把数据的关键词(查询用的)抽取出来,组织成有序数组,然后利用二分查找算法来快速查找数据
动态数据构建索引:
散列表:
增删改查操作的性能非常好,时间复杂度是 O (1)
一些键值数据库,比如 Redis、Memcache,就是使用散列表来构建索引的
这类索引,一般都构建在内存中
红黑树:
数据插入、删除、查找的时间复杂度是 O (logn),也非常适合用来构建内存索引
Ext 文件系统中,对磁盘块的索引,用的就是红黑树
跳表:
支持快速添加、删除、查找数据
通过灵活调整索引结点个数和数据个数之间的比例,可以很好地平衡索引对内存的消耗及其查询效率
Redis 中的有序集合,就是用跳表来构建的
B+ 树:
相比红黑树来说,更加适合构建存储在磁盘中的索引
B+ 树是一个多叉树,所以,对相同个数的数据构建索引,B+ 树的高度要低于红黑树
当借助索引查询数据的时候,读取 B+ 树索引,需要的磁盘 IO 次数会更少
所以,大部分关系型数据库的索引,比如 MySQL、Oracle,都是用 B+ 树来实现的
trie 树:
es 中的单排索引
区块链拿以太坊来说吧,索引用的数据结构是帕特利夏树,一种高级的 trie 树
辅助索引:
位图
布隆过滤器:
扬长避短: 内存占用非常少, 对于判定不存在的数据,那肯定就不存在
针对数据,构建一个布隆过滤器,并且存储在内存中。
当要查询数据的时候,我们可以先通过布隆过滤器,判定是否存在。
如果通过布隆过滤器判定数据不存在,那我们就没有必要读取磁盘中的索引了。
对于数据不存在的情况,数据查询就更加快速了。
并行算法¶
并行排序:
利用分治的思想,对数据进行分片,然后并行处理
归并排序 vs 快速排序
排序的数据规模是 1TB甚至更大时,问题的重点就不是算法的执行效率了,而是数据的读取效率
1TB 的数据肯定是存在硬盘中,无法一次性读取到内存中,
这样在排序的过程中,就会有频繁地磁盘数据的读取和写入。
如何减少磁盘的 IO 操作,减少磁盘数据读取和写入的总量,就变成了优化的重点
并行查找:
散列表是一种非常适合快速查找的数据结构
将数据随机分割成 k 份(比如 16 份)
通过 16 个线程,并行地在这 16 个散列表中查找数据。
并行字符串匹配:
超级大的文本,那处理的时间可能就会变得很长
可以把大的文本,分割成 k 个小文本。假设 k 是 16,我们就启动 16 个线程,
并行地在这 16 个小文本中查找关键词,这样整个查找的性能就提高了 16 倍。
并行搜索:
搜索算法:
1. 广度优先搜索
2. 深度优先搜索
3. Dijkstra 最短路径算法
4. A* 启发式搜索算法
改造之后的并行广度优先搜索算法,我们需要利用两个队列来完成扩展顶点的工作
有 n 个任务,为提高执行的效率,并行执行任务,但是各个任务之间又有一定的依赖关系,如何根据依赖关系找出可以并行执行的任务:
用拓扑关系来构建图安排计算顺序,如:spark,tensorflow
算法实战-Redis¶
Redis 中,键的数据类型是字符串,但是为了丰富数据存储的方式,方便开发者使用,值的数据类型有很多,常用的数据类型有这样几种,它们分别是字符串、列表、字典、集合、有序集合。
列表-list¶
1. 压缩列表(ziplist)
2. 双向循环链表
1. 压缩列表-ziplist¶
当列表中存储的数据量比较小的时候:
1. 列表中保存的单个数据(有可能是字符串类型的)小于 64 字节
2. 列表中数据个数少于 512 个
压缩列表的好处是能利用 l2 缓存,越小越有利于 CPU 缓存
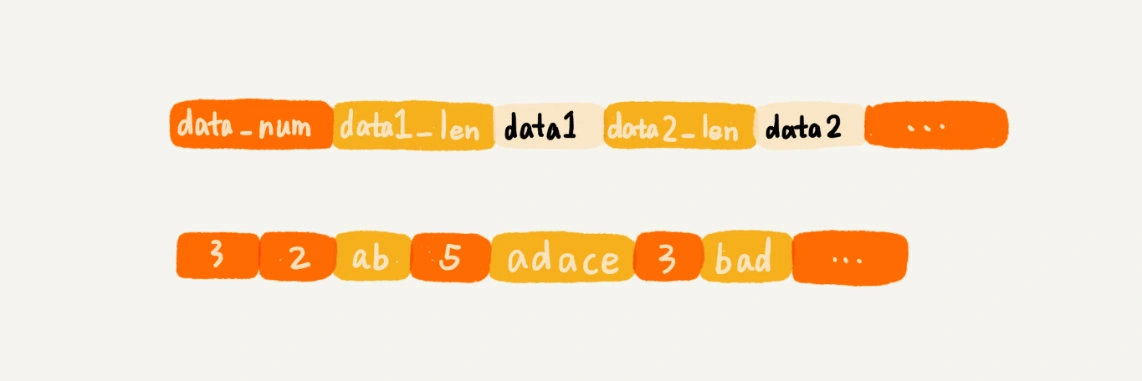
Redis 自己设计的一种数据存储结构——压缩列表。有点儿类似数组,通过一片连续的内存空间,来存储数据。不过,它跟数组不同的一点是,它允许存储的数据大小不同。¶
上图如果用数组设计。数组要求每个元素的大小相同,如果我们要存储不同长度的字符串,那我们就需要用最大长度的字符串大小作为元素的大小(这儿就是5字节)¶
备注
压缩列表这种存储结构,一方面比较节省内存,另一方面可以支持不同类型数据的存储。而且,因为数据存储在一片连续的内存空间,通过键来获取值为列表类型的数据,读取的效率也非常高。
2. 双向循环链表¶
备注
当列表中存储的数据量比较大时,也就是不能同时满足上面的两个条件时,列表就要通过双向循环链表来实现
备注
Redis 的这种双向链表的实现方式,非常值得借鉴。它额外定义一个 list 结构体,来组织链表的首、尾指针,还有长度等信息。这样,在使用的时候就会非常方便。
代码实现:
typedef struct listnode {
struct listNode *prev;
struct listNode *next;
void *value;
} listNode;
typedef struct list {
listNode *head;
listNode *tail;
unsigned long len;
// ....省略其他定义
} list;
字典-hash¶
字典类型用来存储一组数据对。每个数据对又包含键值两部分。字典类型也有两种实现方式:
1. 压缩列表
和列表一样,当存储的数据量比较小的时候使用
2. 散列表
备注
Redis 使用 MurmurHash2 <https://zh.wikipedia.org/wiki/Murmur%E5%93%88%E5%B8%8C> 这种运行速度快、随机性好的哈希算法作为哈希函数。对于哈希冲突问题,Redis 使用链表法来解决。除此之外,Redis 还支持散列表的动态扩容、缩容。
当数据动态增加之后,散列表的装载因子会不停地变大。为了避免散列表性能的下降,当装载因子大于 1 的时候,Redis 会触发扩容,将散列表扩大为原来大小的 2 倍左右。
当数据动态减少之后,为了节省内存,当装载因子小于 0.1 的时候,Redis 就会触发缩容,缩小为字典中数据个数的大约 2 倍大小。
扩容缩容要做大量的数据搬移和哈希值的重新计算,所以比较耗时。针对这个问题,Redis 使用渐进式扩容缩容策略,将数据的搬移分批进行,避免了大量数据一次性搬移导致的服务停顿。
集合-set¶
集合这种数据类型用来存储一组不重复的数据。这种数据类型也有两种实现方法:
1. 基于有序数组
2. 基于散列表
同时满足这两个条件的时候,Redis 就采用有序数组,来实现:
1. 存储的数据都是整数
2. 存储的数据元素个数不超过 512 个
其他情况使用「散列表」
有序集合-sortedset¶
当数据量比较小的时候,Redis 会用压缩列表来实现有序集合:
所有数据的大小都要小于 64 字节
元素个数要小于 128 个
其他情况使用「跳表」
数据结构持久化¶
数据结构持久化到硬盘主要有两种解决思路:
1. 清除原有的存储结构,只将数据存储到磁盘中
当我们需要从磁盘还原数据到内存的时候,再重新将数据组织成原来的数据结构。
实际上,Redis 采用的就是这种持久化思路。
2. 保留原来的存储格式,将数据按照原有的格式存储在磁盘中
以散列表这样的数据结构来举例。
我们可以将散列表的大小、每个数据被散列到的槽的编号等信息,都保存在磁盘中。
有了这些信息,我们从磁盘中将数据还原到内存中的时候,就可以避免重新计算哈希值。
第1种方法的弊端:
那就是数据从硬盘还原到内存的过程,会耗用比较多的时间。
如,我们现在要将散列表中的数据存储到磁盘。
当我们从磁盘中,取出数据重新构建散列表的时候,需要重新计算每个数据的哈希值。
如果磁盘中存储的是几 GB 的数据,那重构数据结构的耗时就不可忽视了
算法实战-搜索引擎¶
搜索引擎大致可以分为四个部分:
1. 搜集
利用爬虫爬取网页
2. 分析
主要负责网页内容抽取、分词,构建临时索引,计算 PageRank 值这几部分工作
3. 索引
主要负责通过分析阶段得到的临时索引,构建倒排索引
4. 查询
主要负责响应用户的请求,根据倒排索引获取相关网页,计算网页排名,返回查询结果给用户
搜集¶
基本的原理:先找一些比较知名的网页(专业的叫法是权重比较高)的链接(比如新浪主页网址、腾讯主页网址等),作为种子网页链接,放入到队列中。爬虫按照广度优先的策略,不停地从队列中取出链接,然后去爬取对应的网页,解析出网页里包含的其他网页链接,再将解析出来的链接添加到队列中
待爬取网页链接文件:links.bin:
用一个存储在磁盘中的文件(links.bin)来作为广度优先搜索中的队列。 爬虫从 links.bin 文件中,取出链接去爬取对应的页面。 等爬取到网页之后,将解析出来的链接,直接存储到 links.bin 文件中
网页判重文件:bloom_filter.bin:
定期地(比如每隔半小时)将布隆过滤器持久化到磁盘中,存储在 bloom_filter.bin 文件中 防止机器宕机重启之后,布隆过滤器就被清空
原始网页存储文件:doc_raw.bin:
如果我们把每个网页都存储为一个独立的文件,那磁盘中的文件就会非常多,数量可能会有几千万,甚至上亿 所以,我们可以把多个网页存储在一个文件中。每个网页之间,通过一定的标识进行分隔,方便后续读取 存储格式如下: 网页编号 网页大小 网页 分隔符 doc1_id \t doc1_size \t doc1 \r\n\r\n doc2_id \t doc2_size \t doc2 \r\n\r\n ...
网页链接及其编号的对应文件:doc_id.bin:
网页编号实际上就是给每个网页分配一个唯一的 ID,方便我们后续对网页进行分析、索引 如何给网页编号: 我们可以按照网页被爬取的先后顺序,从小到大依次编号。 具体是这样做的: 维护一个中心的计数器,每爬取到一个网页,就从计数器中拿一个号码,分配给这个网页,然后计数器加一 在存储网页的同时,我们将网页链接跟编号之间的对应关系,存储在另一个 doc_id.bin 文件中
分析¶
分析阶段主要包括两个步骤:
1. 抽取网页文本信息
2. 分词并创建临时索引
抽取网页文本信息:
网页是半结构化数据,里面夹杂着各种标签、JavaScript 代码、CSS 样式 依靠 HTML 标签来抽取网页中的文本信息 抽取的过程,大体可以分为两步: a. 去掉 JavaScript 代码、CSS 格式以及下拉框中的内容 b. 去掉所有 HTML 标签。这一步也是通过字符串匹配算法来实现的
分词并创建临时索引:
对于英文网页来说,分词非常简单。我们只需要通过空格、标点符号等分隔符,将每个单词分割开来就可以了 对于中文网页来说,分词就复杂太多了。一种比较简单的思路是基于字典和规则的分词方法 每个网页的文本信息在分词完成之后,我们都得到一组单词列表。 我们把单词与网页之间的对应关系,写入到一个临时索引文件中(tmp_Index.bin) 这个临时索引文件用来构建倒排索引文件 临时索引文件的格式如下: 单词编号 分隔符 网页编号 分隔符 term1_id \t doc1_id \r\n term2_id \t doc2_id \r\n ... 当所有的网页处理(分词及写入临时索引)完成之后, 我们再将这个单词跟编号之间的对应关系,写入到磁盘文件中,并命名为 term_id.bin
备注
经过分析阶段,我们得到了两个重要的文件。它们分别是临时索引文件 tmp_index.bin 和单词编号文件 term_id.bin
索引¶
备注
索引阶段主要负责将分析阶段产生的临时索引,构建成倒排索引。倒排索引( Inverted index)中记录了每个单词以及包含它的网页列表。
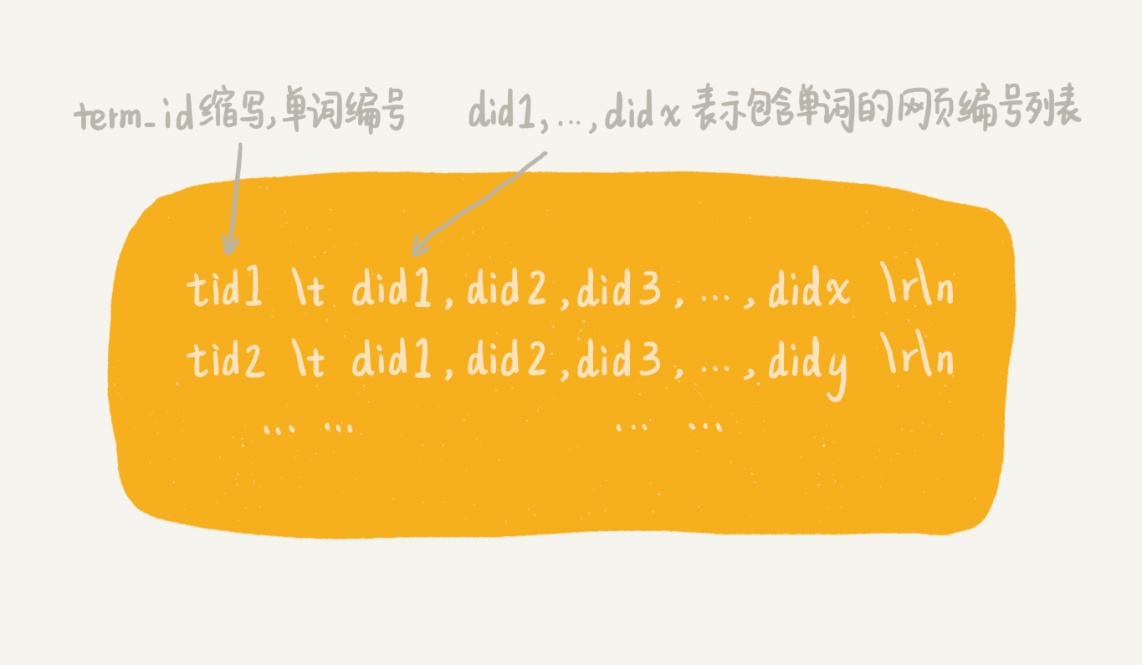
倒排索引的结构图¶
通过临时索引文件,构建出倒排索引文件。解决这个问题的方法有很多。考虑到临时索引文件很大,无法一次性加载到内存中,搜索引擎一般会选择使用多路归并排序的方法来实现。
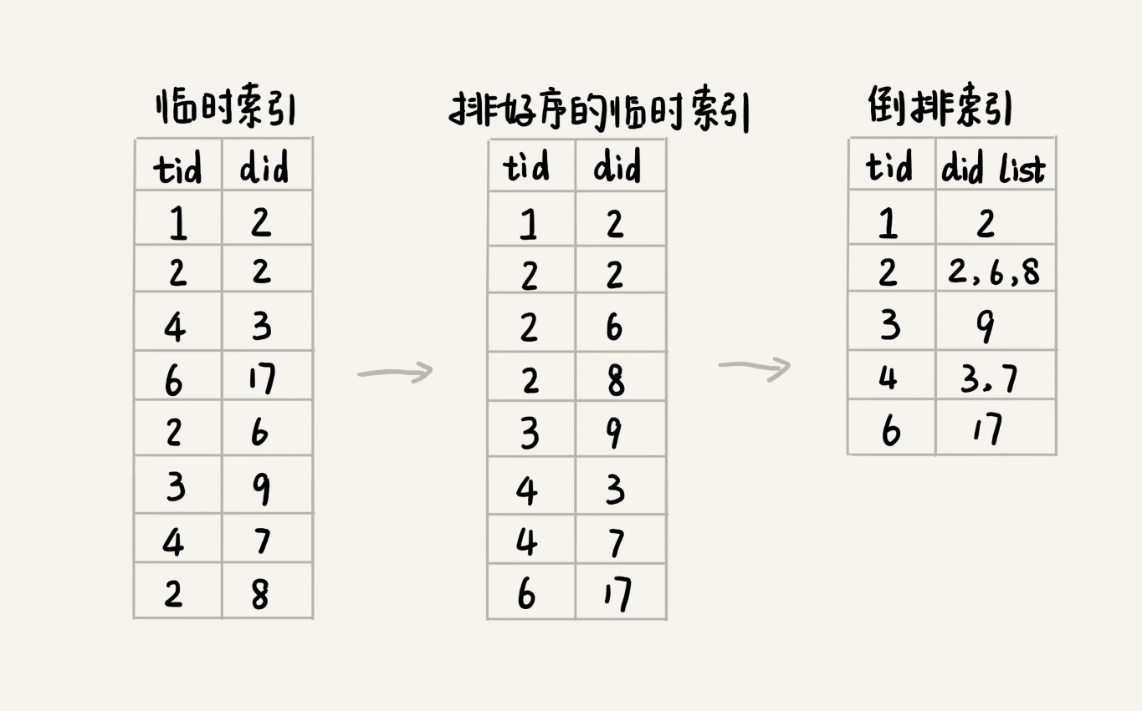
临时索引文件排序完成之后,相同的单词就被排列到了一起。我们只需要顺序地遍历排好序的临时索引文件,就能将每个单词对应的网页编号列表找出来,然后把它们存储在倒排索引文件中。¶
除了倒排文件之外,我们还需要一个文件,来记录每个单词编号在倒排索引文件中的偏移位置。我们把这个文件命名为 term_offset.bin 。这个文件的作用是,帮助我们快速地查找某个单词编号在倒排索引中存储的位置,进而快速地从倒排索引中读取单词编号对应的网页编号列表。
备注
经过索引阶段的处理,我们得到了两个有价值的文件,它们分别是倒排索引文件(index.bin)和记录单词编号在索引文件中的偏移位置的文件(term_offset.bin)
查询¶
要利用之前产生的几个文件,来实现最终的用户搜索功能:
1. doc_id.bin:记录网页链接和编号之间的对应关系
2. term_id.bin:记录单词和编号之间的对应关系
3. index.bin:倒排索引文件,记录每个单词编号以及对应包含它的网页编号列表
4. term_offsert.bin:记录每个单词编号在倒排索引文件中的偏移位置
备注
除了倒排索引文件(index.bin)比较大之外,其他的都比较小。为了方便快速查找数据,我们将其他三个文件都加载到内存中,并且组织成散列表这种数据结构
点击搜索时:
1. 先对用户输入的文本进行分词处理。假设分词之后,我们得到 k 个单词
2. 拿这 k 个单词,去 term_id.bin 对应的散列表中,查找对应的单词编号。
经过这个查询之后,我们得到了这 k 个单词对应的单词编号
3. 拿这 k 个单词编号,去 term_offset.bin 的散列表中,查找每个单词编号在倒排索引文件中的偏移位置
经过这个查询之后,我们得到了 k 个偏移位置
4. 拿这 k 个偏移位置,去倒排索引(index.bin)中,查找 k 个单词对应的包含它的网页编号列表
经过这一步查询之后,我们得到了 k 个网页编号列表。
5. 针对这 k 个网页编号列表,统计每个网页编号出现的次数。
具体到实现层面,我们可以借助散列表来进行统计。
统计得到的结果,我们按照出现次数的多少,从小到大排序。
出现次数越多,说明包含越多的用户查询单词(用户输入的搜索文本,经过分词之后的单词)。
6. 经过这一系列查询,我们就得到了一组排好序的网页编号。
我们拿着网页编号,去 doc_id.bin 文件中查找对应的网页链接,分页显示给用户就可以了
总结¶
计算网页权重的PageRank算法
计算查询结果排名的tf-idf模型
涉及的数据结构和算法有:
图、散列表、Trie 树、布隆过滤器、单模式字符串匹配算法、AC 自动机、广度优先遍历、归并排序
算法实战-高性能队列 Disruptor¶
备注
它是一种内存消息队列。从功能上讲,它其实有点儿类似 Kafka。
队列有两种实现思路:
一种是基于链表实现的链式队列
一种是基于数组实现的顺序队列
要实现一个无界队列
也就是说,队列的大小事先不确定,理论上可以支持无限大。
这种情况下,我们适合选用链表来实现队列。
因为链表支持快速地动态扩容。
要实现一个有界队列
也就是说,队列的大小事先确定,当队列中数据满了之后,生产者就需要等待。
直到消费者消费了数据,队列有空闲位置的时候,生产者才能将数据放入
相较于无界队列,有界队列的应用场景更加广泛。
毕竟,我们的机器内存是有限的。而无界队列占用的内存数量是不可控的
备注
非循环的顺序队列在添加、删除数据的工程中,会涉及数据的搬移操作,导致性能变差。而循环队列正好可以解决这个数据搬移的问题,所以,性能更加好。所以,大部分用到顺序队列的场景中,我们都选择用顺序队列中的循环队列。
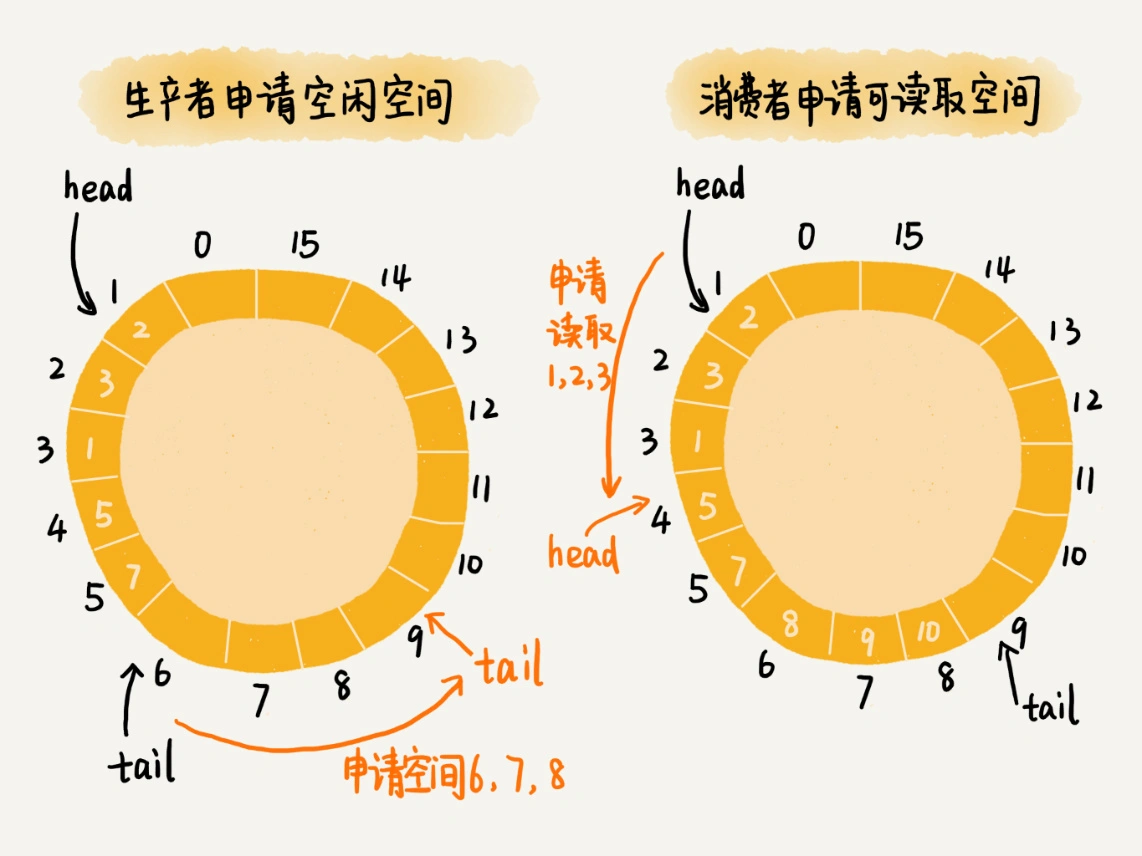
基于无锁的并发 “生产者 - 消费者模型”: 对于生产者来说,它往队列中添加数据之前,先申请可用空闲存储单元,并且是批量地申请连续的 n 个(n≥1)存储单元。当申请到这组连续的存储单元之后,后续往队列中添加元素,就可以不用加锁了,因为这组存储单元是这个线程独享的。¶
算法实战-鉴权¶
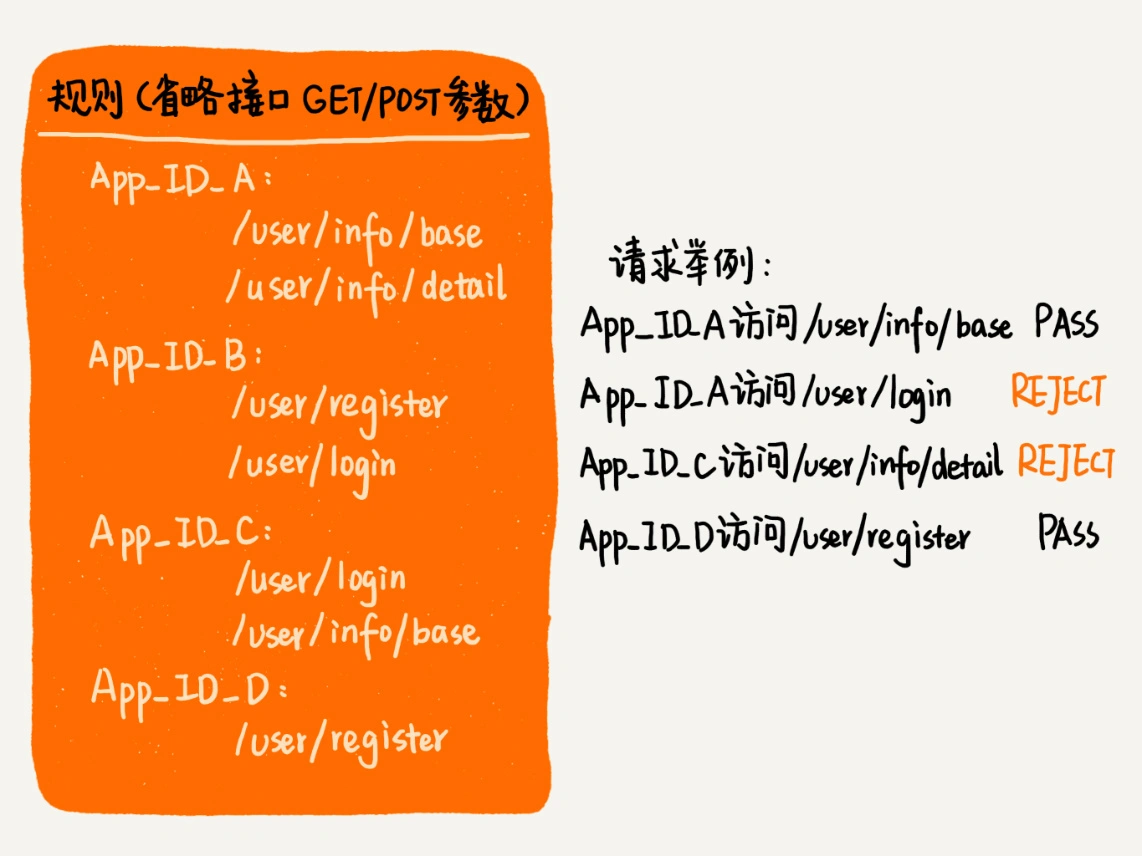
1. 如何实现精确匹配规则¶
规则不会经常变动,
所以,为加快匹配速度,可以按字符串的大小给规则排序,组织成有序数组这种数据结构
二分查找算法的时间复杂度是 O (logn)(n 表示规则的个数)
匹配的算法:
KMP、BM、BF
2. 如何实现前缀匹配规则¶
不同的应用对应不同的规则集合。我们采用散列表来存储这种对应关系
每个应用的规则集合,最适合用 Trie 树来做前缀匹配
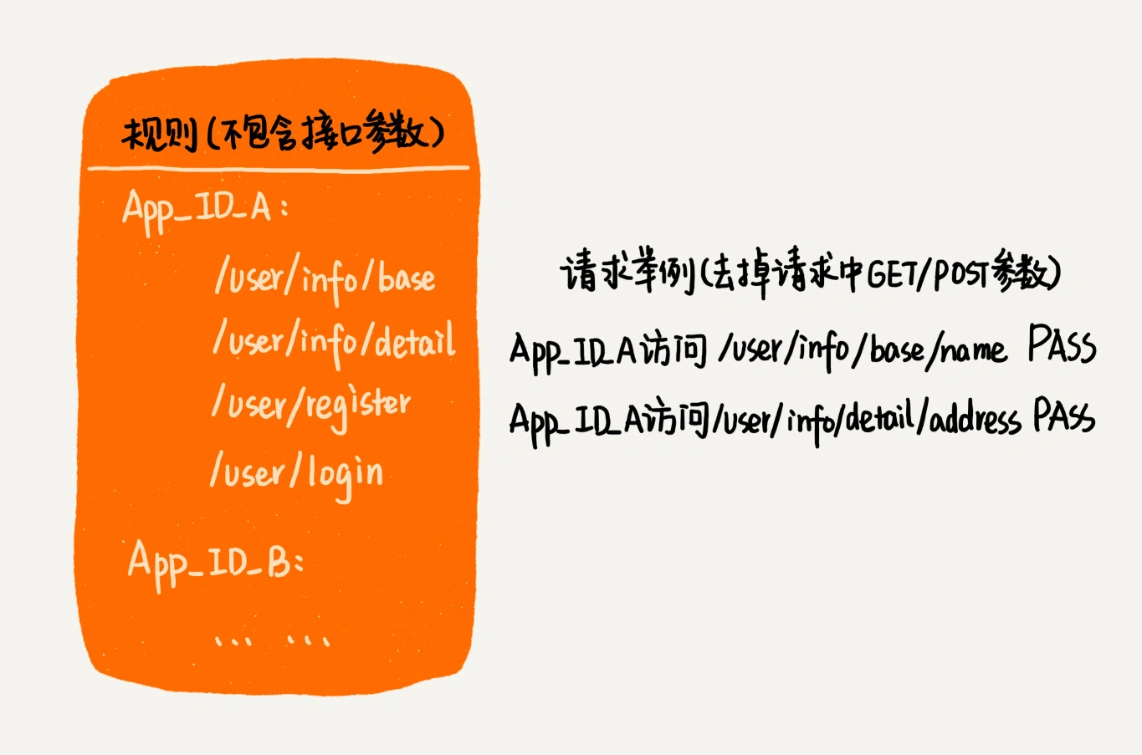
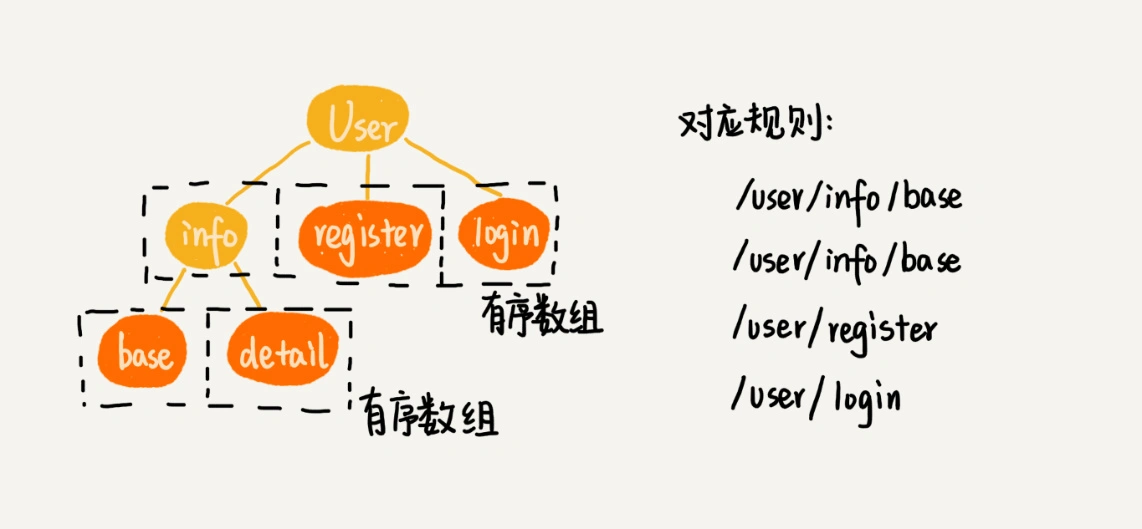
在 Trie 树中,我们可以把每个节点的子节点们,组织成有序数组这种数据结构。在匹配的过程中,我们可以利用二分查找算法,决定从一个节点应该跳到哪一个子节点。¶
3. 如何实现模糊匹配规则¶
规则中包含通配符,比如:
“**” 表示匹配任意多个子目录
“*” 表示匹配任意一个子目录
算法:
回溯算法
技巧:
把不包含通配符的规则,组织成有序数组或者 Trie 树
剩下的是少数包含通配符的规则,我们只要把它们简单存储在一个数组中
当接收到一个请求 URL 之后:
我们可以先在不包含通配符的有序数组或者 Trie 树中查找
如果能够匹配,就不需要继续在通配符规则中匹配了
如果不能匹配,就继续在通配符规则中查找匹配
算法实战-限流¶
备注
限流已经成为了保证系统平稳运行的一种标配的技术解决方案。
限流算法:
1. 固定时间窗口限流算法
2. 滑动时间窗口限流算法
3. 令牌桶算法
4. 漏桶算法
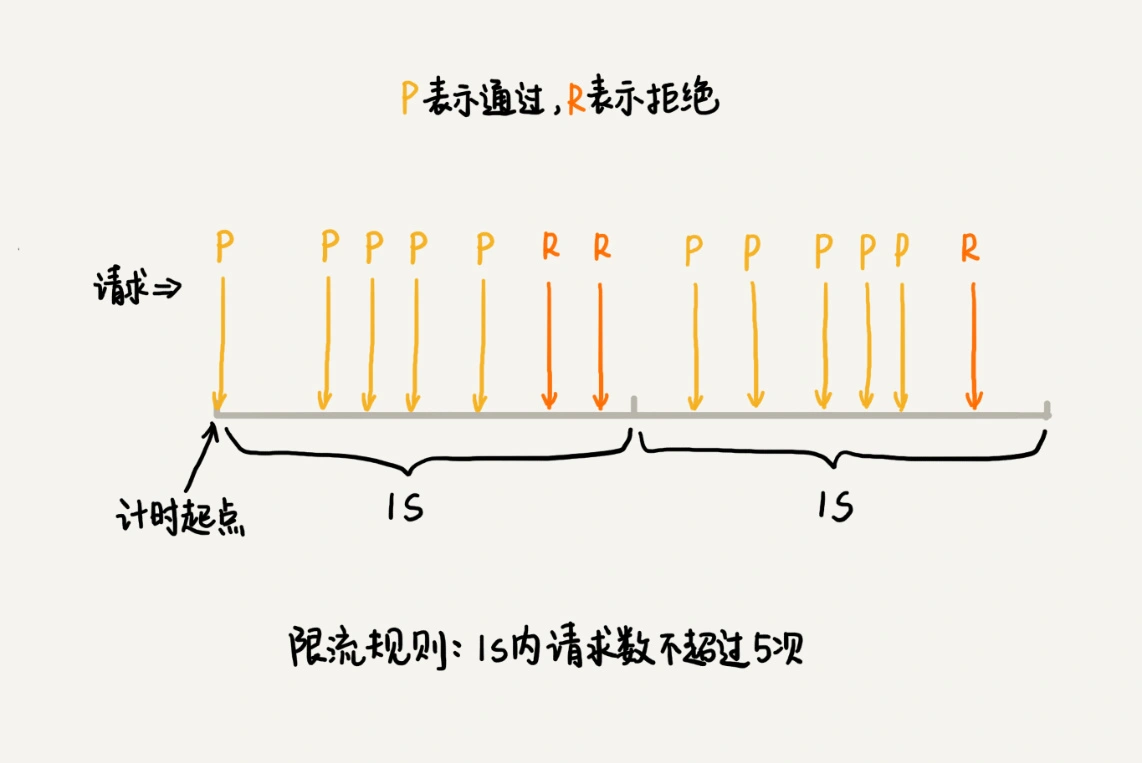
1.固定时间窗口限流算法¶
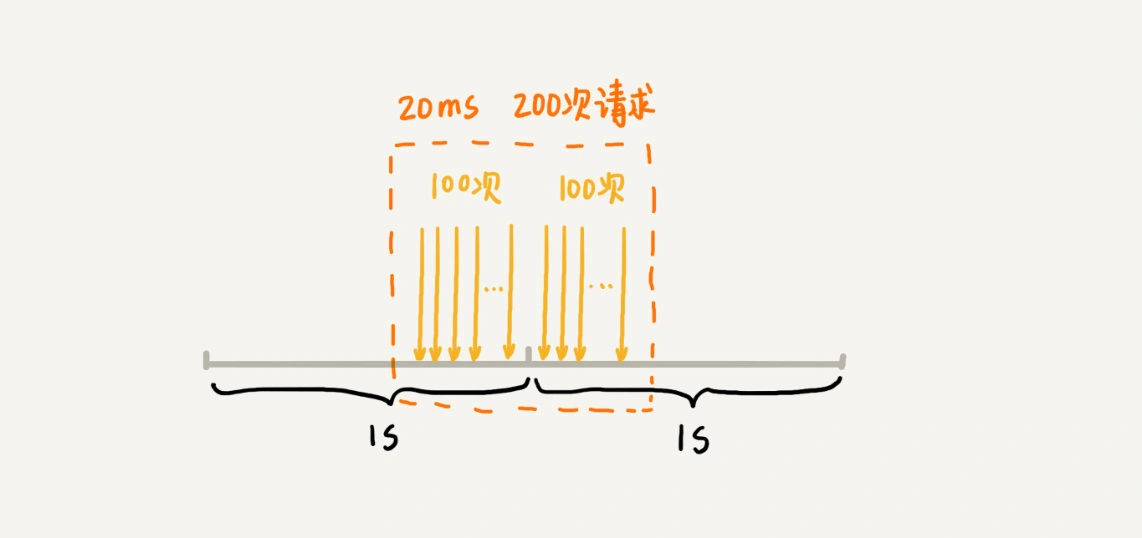
固定时间窗口限流算法的问题¶
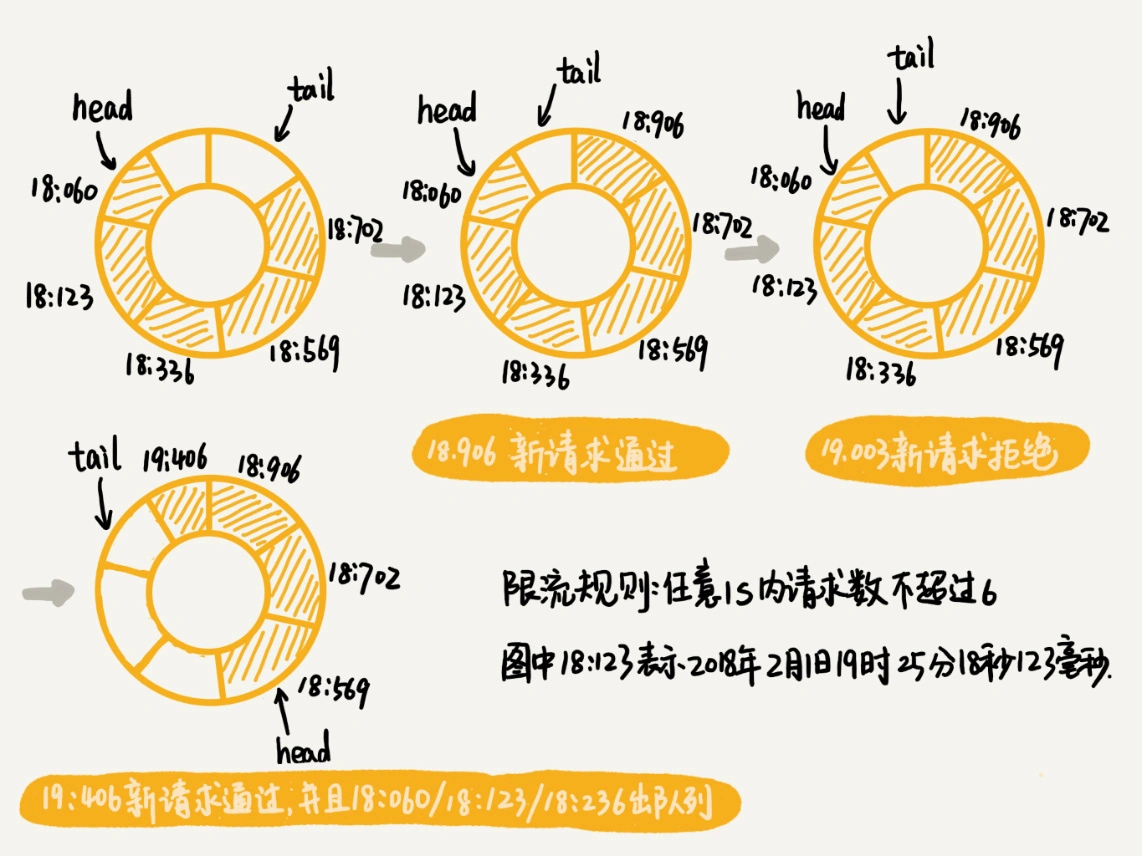
2.滑动时间窗口限流算法¶
短网址¶
MurmurHash 算法:
这个哈希算法在 2008 年才被发明出来
但现在它已经广泛应用到众多著名的软件中:
Redis、MemCache、Cassandra、HBase、Lucene
测验¶
必知必会的代码实现:
数组
实现一个支持动态扩容的数组
实现一个大小固定的有序数组,支持动态增删改操作
实现两个有序数组合并为一个有序数组
链表
实现单链表、循环链表、双向链表,支持增删操作实现
单链表反转
实现两个有序的链表合并为一个有序链表
实现求链表的中间结点
栈
用数组实现一个顺序栈
用链表实现一个链式栈
编程模拟实现一个浏览器的前进、后退功能
队列
用数组实现一个顺序队列
用链表实现一个链式队列
实现一个循环队列
递归
编程实现斐波那契数列求值 f(n)=f(n-1)+f(n-2)
编程实现求阶乘 n!
编程实现一组数据集合的全排列
排序
实现归并排序、快速排序、插入排序、冒泡排序、选择排序
编程实现 O(n) 时间复杂度内找到一组数据的第 K 大元素
二分查找
实现一个有序数组的二分查找算法
实现模糊二分查找算法(比如大于等于给定值的第一个元素)
散列表
实现一个基于链表法解决冲突问题的散列表
实现一个 LRU 缓存淘汰算法
字符串
实现一个字符集,只包含 a~z 这 26 个英文字母的 Trie 树
实现朴素的字符串匹配算法
二叉树
实现一个二叉查找树,并且支持插入、删除、查找操作
实现查找二叉查找树中某个节点的后继、前驱节点
实现二叉树前、中、后序以及按层遍历
堆
实现一个小顶堆、大顶堆、优先级队列
实现堆排序
利用优先级队列合并 K 个有序数组
求一组动态数据集合的最大 Top K
图
实现有向图、无向图、有权图、无权图的邻接矩阵和邻接表表示方法
实现图的深度优先搜索、广度优先搜索
实现 Dijkstra 算法、A* 算法
实现拓扑排序的 Kahn 算法、DFS 算法
回溯
利用回溯算法求解八皇后问题
利用回溯算法求解 0-1 背包问题
分治
利用分治算法求一组数据的逆序对个数
动态规划
0-1 背包问题
最小路径和(详细可看 @Smallfly 整理的 Minimum Path Sum)
编程实现莱文斯坦最短编辑距离
编程实现查找两个字符串的最长公共子序列
编程实现一个数据序列的最长递增子序列
栈¶
Valid Parentheses(有效的括号) 英文版:https://leetcode.com/problems/valid-parentheses/ 中文版:https://leetcode-cn.com/problems/valid-parentheses/ Longest Valid Parentheses(最长有效的括号) 英文版:https://leetcode.com/problems/longest-valid-parentheses/ 中文版:https://leetcode-cn.com/problems/longest-valid-parentheses/ Evaluate Reverse Polish Notatio(逆波兰表达式求值) 英文版:https://leetcode.com/problems/evaluate-reverse-polish-notation/ 中文版:https://leetcode-cn.com/problems/evaluate-reverse-polish-notation/
队列¶
Design Circular Deque(设计一个双端队列) 英文版:https://leetcode.com/problems/design-circular-deque/ 中文版:https://leetcode-cn.com/problems/design-circular-deque/ Sliding Window Maximum(滑动窗口最大值) 英文版:https://leetcode.com/problems/sliding-window-maximum/ 中文版:https://leetcode-cn.com/problems/sliding-window-maximum/
递归¶
Climbing Stairs(爬楼梯) 英文版:https://leetcode.com/problems/climbing-stairs/ 中文版:https://leetcode-cn.com/problems/climbing-stairs/
排序&二分查找¶
Sqrt (x) (x 的平方根) 英文版:https://leetcode.com/problems/sqrtx/ 中文版:https://leetcode-cn.com/problems/sqrtx/
字符串¶
Reverse String (反转字符串) 英文版:https://leetcode.com/problems/reverse-string/ 中文版:https://leetcode-cn.com/problems/reverse-string/ Reverse Words in a String(翻转字符串里的单词) 英文版:https://leetcode.com/problems/reverse-words-in-a-string/ 中文版:https://leetcode-cn.com/problems/reverse-words-in-a-string/ String to Integer (atoi)(字符串转换整数 (atoi)) 英文版:https://leetcode.com/problems/string-to-integer-atoi/ 中文版:https://leetcode-cn.com/problems/string-to-integer-atoi/
二叉树¶
Invert Binary Tree(翻转二叉树) 英文版:https://leetcode.com/problems/invert-binary-tree/ 中文版:https://leetcode-cn.com/problems/invert-binary-tree/ Maximum Depth of Binary Tree(二叉树的最大深度) 英文版:https://leetcode.com/problems/maximum-depth-of-binary-tree/ 中文版:https://leetcode-cn.com/problems/maximum-depth-of-binary-tree/ Validate Binary Search Tree(验证二叉查找树) 英文版:https://leetcode.com/problems/validate-binary-search-tree/ 中文版:https://leetcode-cn.com/problems/validate-binary-search-tree/ Path Sum(路径总和) 英文版:https://leetcode.com/problems/path-sum/ 中文版:https://leetcode-cn.com/problems/path-sum/
图¶
Number of Islands(岛屿的个数) 英文版:https://leetcode.com/problems/number-of-islands/description/ 中文版:https://leetcode-cn.com/problems/number-of-islands/description/Valid Sudoku(有效的数独) 英文版:https://leetcode.com/problems/valid-sudoku/
回溯&动态规划¶
Regular Expression Matching(正则表达式匹配) 英文版:https://leetcode.com/problems/regular-expression-matching/ 中文版:https://leetcode-cn.com/problems/regular-expression-matching/ Minimum Path Sum(最小路径和) 英文版:https://leetcode.com/problems/minimum-path-sum/ 中文版:https://leetcode-cn.com/problems/minimum-path-sum/ Coin Change (零钱兑换) 英文版:https://leetcode.com/problems/coin-change/ 中文版:https://leetcode-cn.com/problems/coin-change/ Best Time to Buy and Sell Stock(买卖股票的最佳时机) 英文版:https://leetcode.com/problems/best-time-to-buy-and-sell-stock/ 中文版:https://leetcode-cn.com/problems/best-time-to-buy-and-sell-stock/ Maximum Product Subarray(乘积最大子序列) 英文版:https://leetcode.com/problems/maximum-product-subarray/ 中文版:https://leetcode-cn.com/problems/maximum-product-subarray/ Triangle(三角形最小路径和) 英文版:https://leetcode.com/problems/triangle/ 中文版:https://leetcode-cn.com/problems/triangle/
总结¶
怎么才算真正掌握了一个数据结构或算法¶
备注
不管是基础数据结构和算法,还是高级数据结构和算法,我们更侧重掌握它的特点、时间空间复杂度、能解决的问题、应用场景。毕竟掌握了这些之后,我们就可以在实际的开发中,遇到相应的问题或者场景,能快速的反映出,可以用哪种数据结构和算法解决。对原理或者代码实现,即便你可能已经记忆不清楚了,但也可以通过重温一遍,快速的掌握。
基础的部分:
1. 结构: 链表、数组、队列、栈、二叉树、堆、图的定义
2. 算法: 排序、二分查找、二叉树的遍历、图的广度、深度优先搜索、字符串朴素匹配算法,
3. 算法思想: 递归、分治、贪心、回溯、动态规划
参考¶
算法导论
【极客时间】数据结构与算法之美
一致性哈希算法 consistent hashing: https://www.zsythink.net/archives/1182
漫画:什么是一致性哈希?: https://mp.weixin.qq.com/s/yimfkNYF_tIJJqUIzV7TFA
临时¶
一致性 hash 算法,https://github.com/lanyilee/ConsistentHash